ドローンの閉ループシステム同定によるモデリングと飛行制御
モデリングと制御
モデリング(modeling): 対象とするシステムのモデルを構築すること.
モデル(model): 対象の特性を記述するもの(あるいは表現)ここでは特に数学モデルのことをいう.
モデルは実システムの具体的な世界と制御理論の抽象的な世界を結びつけるインタフェース

モデリングの二つのアプローチ
第一原理モデリング(first principle modeling, 物理モデリング,ホワイトボックスモデリング)
運動方程式,保存則,回路方程式,化学反応式など,対象の特性を支配する科学法則(第一原理)に基づくモデリング
システム同定(system identification, ブラックボックスモデリング)
対象の振る舞いをセンシングして得られたデータに基づくモデリング
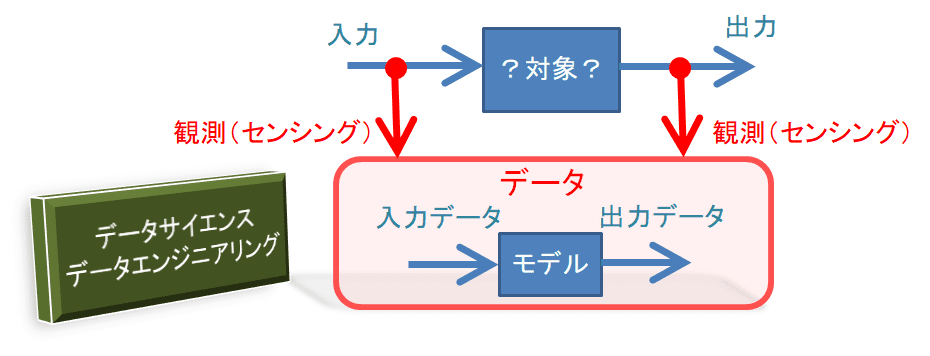
データエンジニアリングにおけるモデリング
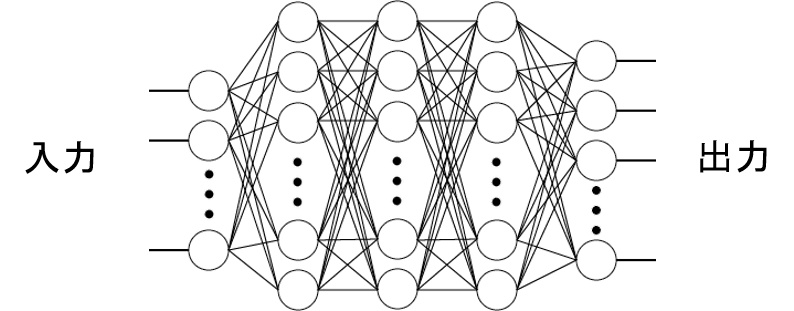
多層ニューラルネットワーク
- 大量のデータを使って,
- 大規模(冗長な)な構造を決めて,
- 重みを求める.
- 非線形も扱える.
目的:入出力間の関係を説明する.
主な用途:予測,変化検出,診断
システム同定
- 与えられたデータを使って,
- 対象の動特性を考慮した上でモデル構造を決めて,
- モデルの係数(重み)を求める.
- 静的非線形は扱える.
目的:対象の動的振る舞いを説明する.
主な用途:予測,変化検出,診断,制御
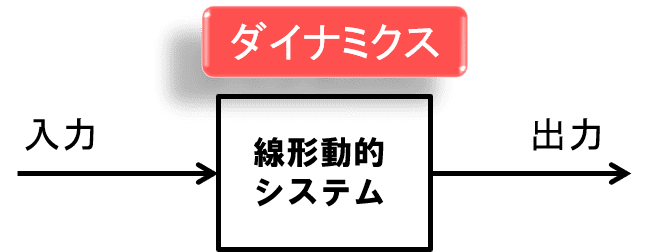
インテリジェントな機械に自動制御は必要.制御系設計には「動的モデリング」が不可欠!
技術シード:MOESP型閉ループ部分空間同定法(CL-MOESP)
理論
- Direct closed-loop subspace model identification algorithm (43rd CDC 2004)
- QR-factorization-based (MOESP-type) direct closed-loop subspace model identification algorithm (MTNS 2006,計測自動制御学会論文集 2006)
- 推定値の漸近的性質 (MTNS 2010,,計測自動制御学会論文集 2010)
実証研究・応用研究
- 台車-倒立振子系 (ICCAS-SICE 2009)
- 同軸反転式小型ラジコンヘリコプタ (SYSID 2012, 日本機械学会 2012,SICE 2014)
- クワッドロータドローン (SYSID 2018)
AR.Drone2.0(クアッドコプタ)を用いたデュアルレート系の閉ループ同定法の実証実験
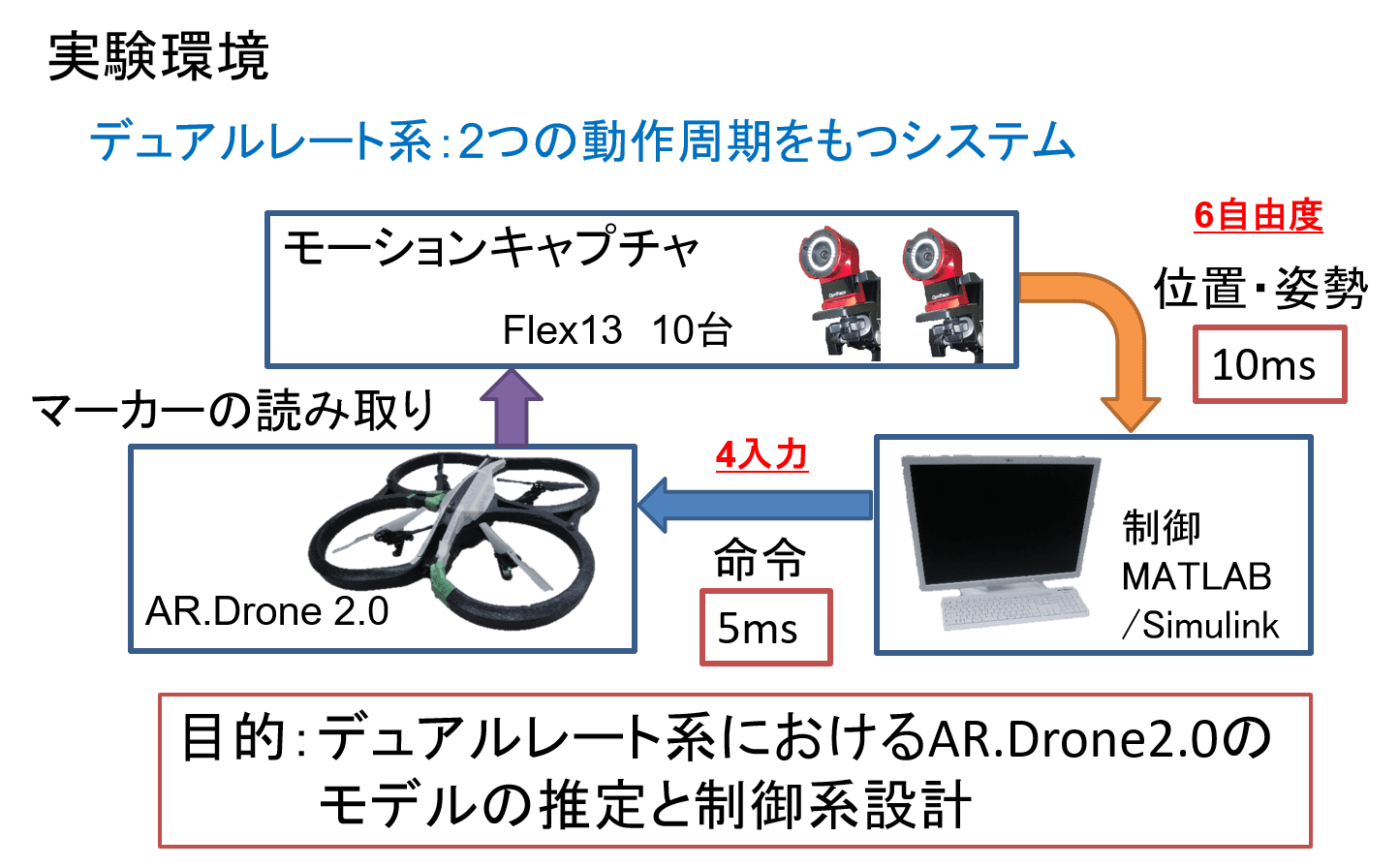
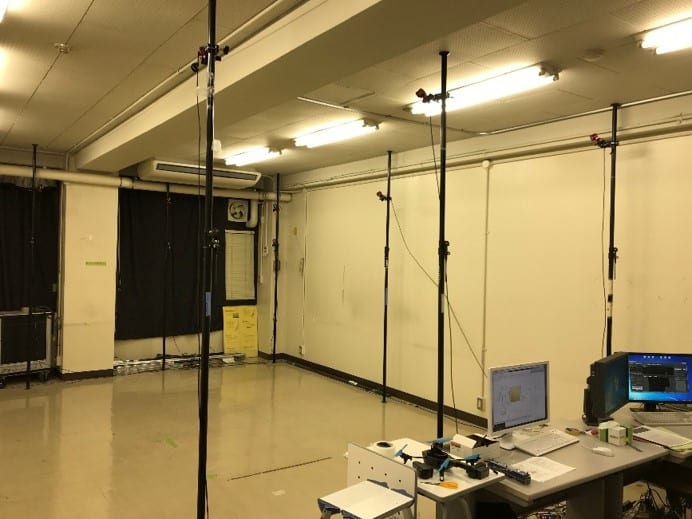
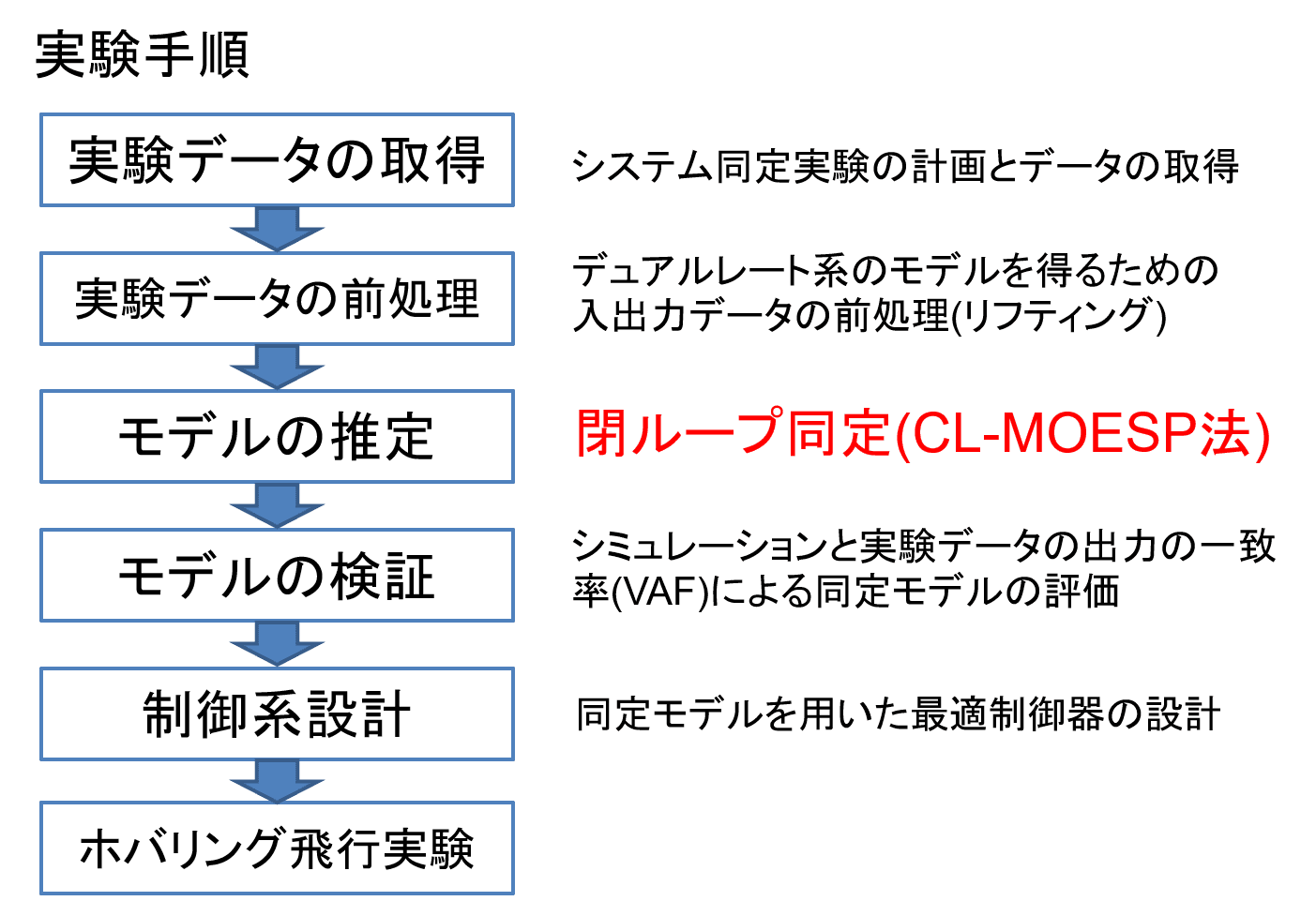
閉ループシステム同定実験
実験で採取したデータを用いてCL-MOESP法により同定モデルを得る.
大きなモータ音が聞こえます.音量にご注意ください.
https://www.research.oit.ac.jp/oitid/archive/2020/wp-content/uploads/2020/09/f251c3370fd1073ad87bec3e2a02a6f6.mp4
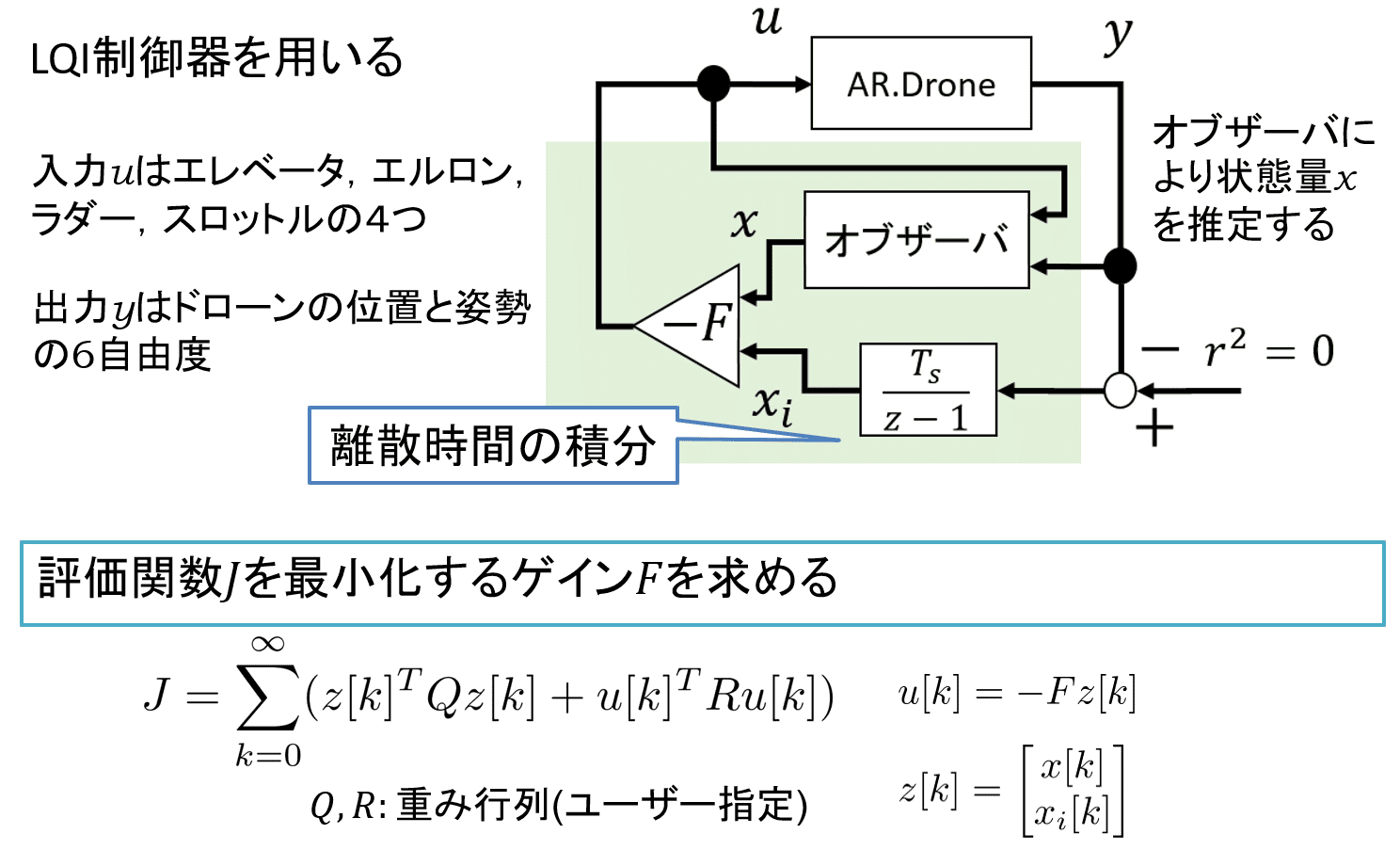
同定モデルを使った最適制御器の設計
ホバリング飛行実験による制御系の検証
手順:
- オンボードプログラムを使って地上1mまで上昇させる
- フィードバック制御開始
システム同定より得られたモデルに基づき制御器を再設計することにより揺動幅が減少した.
https://www.research.oit.ac.jp/oitid/archive/2020/wp-content/uploads/2020/09/2c31a67dabbffbad0a2d9d902c555500.mp4