実行不要な命令を動的に排除する効率的なプロセッサ
プロセッサの命令実行の効率性を妨げる要因の1つとして,ロード命令の実行にかかる時間が大きいことが挙げられる。この研究の目的は,不要なロード命令の一部を動的に排除(スキップ)するようなプロセッサの構成を提案し,命令実行の効率性をあげようとするものである。シミュレーションによる評価からおおよそ15%程度のロード命令がスキップできる可能性があり、また全体のプログラム実行時間をおおよそ8%程度減少させることが期待できる。
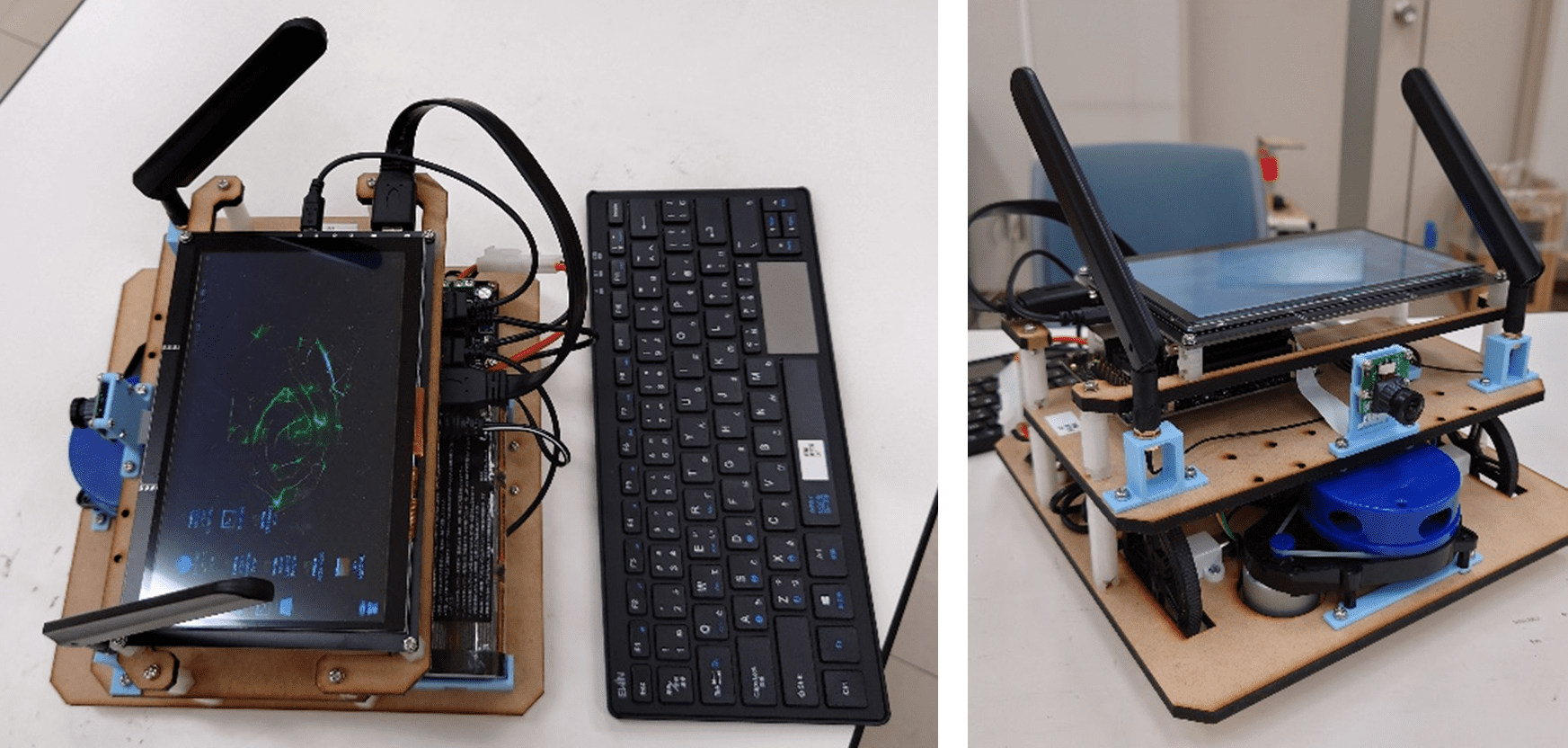
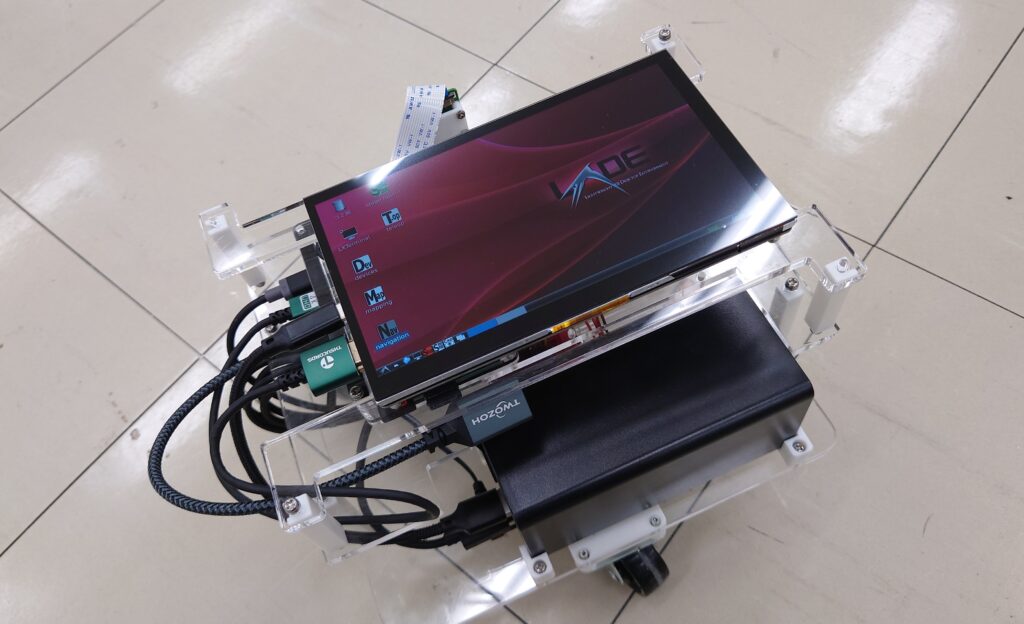
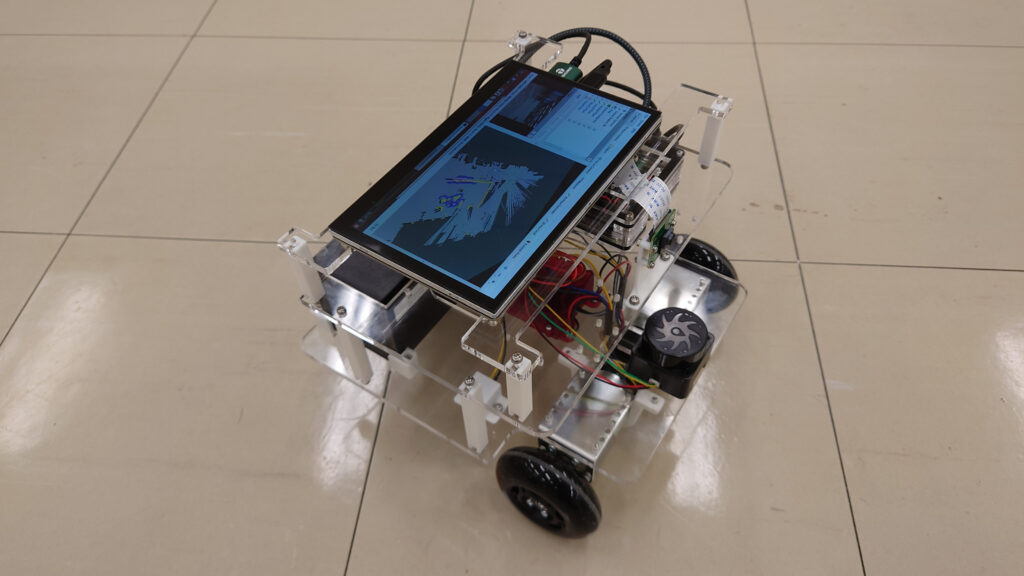
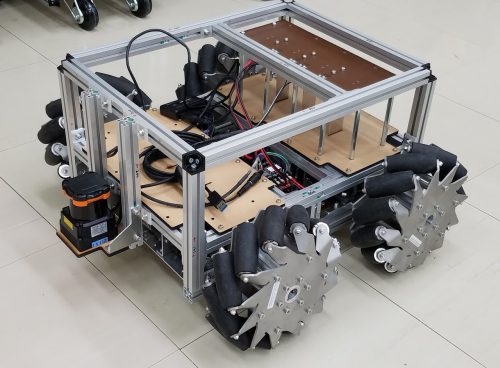
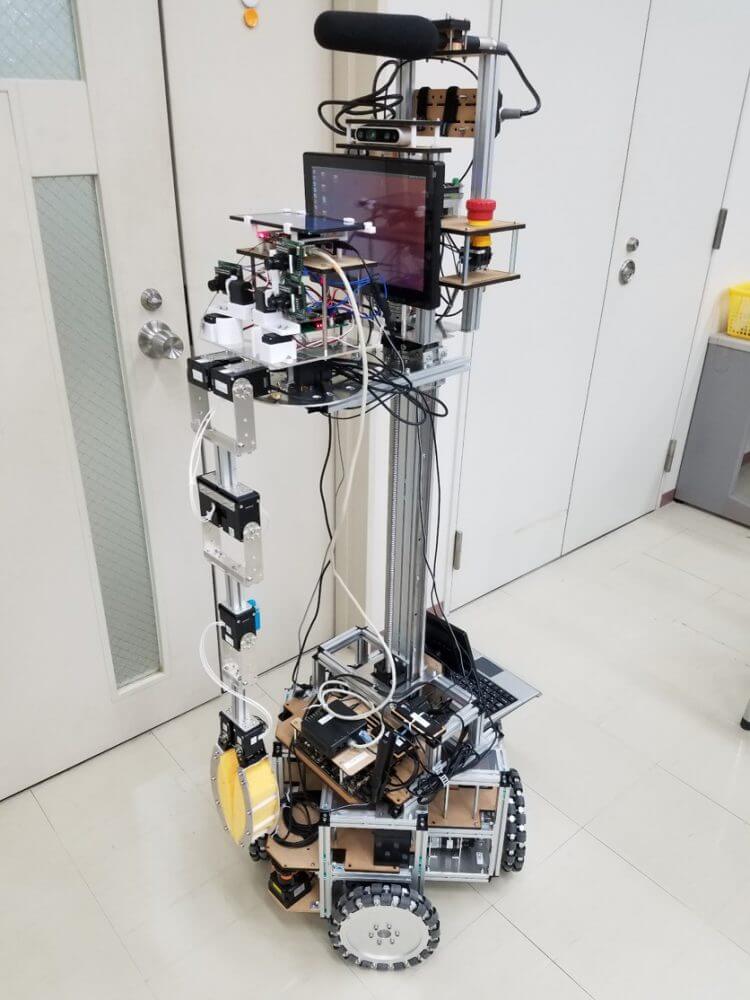
ROS(Robot Operating System)はロボット制御ソフトウェアの効率的な開発を実現するツール・ライブラリ群のセットで,世界中でロボットの研究・開発に利用されています. 本シーズはROSを通じたロボットのプログラミング研修に適したオリジナルのロボットを提供するものです.このロボットはハードウェアの構造も比較的分かりやすいように設計されているため,ソフトウェアの研修を終えた後に自分自身でロボットを構築する手助けとなります. 実際に提案するロボットを使ったROSの技術セミナーを開催し,参加者からは好意的な評価を得ています. また,大阪工業大学情報科学部でもPythonやC++によるロボット制御プログラミングを学ぶための教材としてゼミやPBL(Project Based Learning)で活用しています. ゼミやPBLにおいては小型の車輪移動ロボットと中・大型のロボットを使い分け,効率的に学習を進められるように配慮しています. 市販の大型ロボットは高価なものが多いですが,独自に設計・製作したロボットは低コストで手軽に利用可能です. 4足歩行ロボットや車輪移動型ロボットに装着するアーム等も製作しており,様々な研修用ロボットの製作ノウハウを有しています.


論文
「Online learning environment for robotics programming using ROS simulator」(2022)『Proceedings of the 10th IIAE International Conference on Industrial Application Engineering』p.203-207.
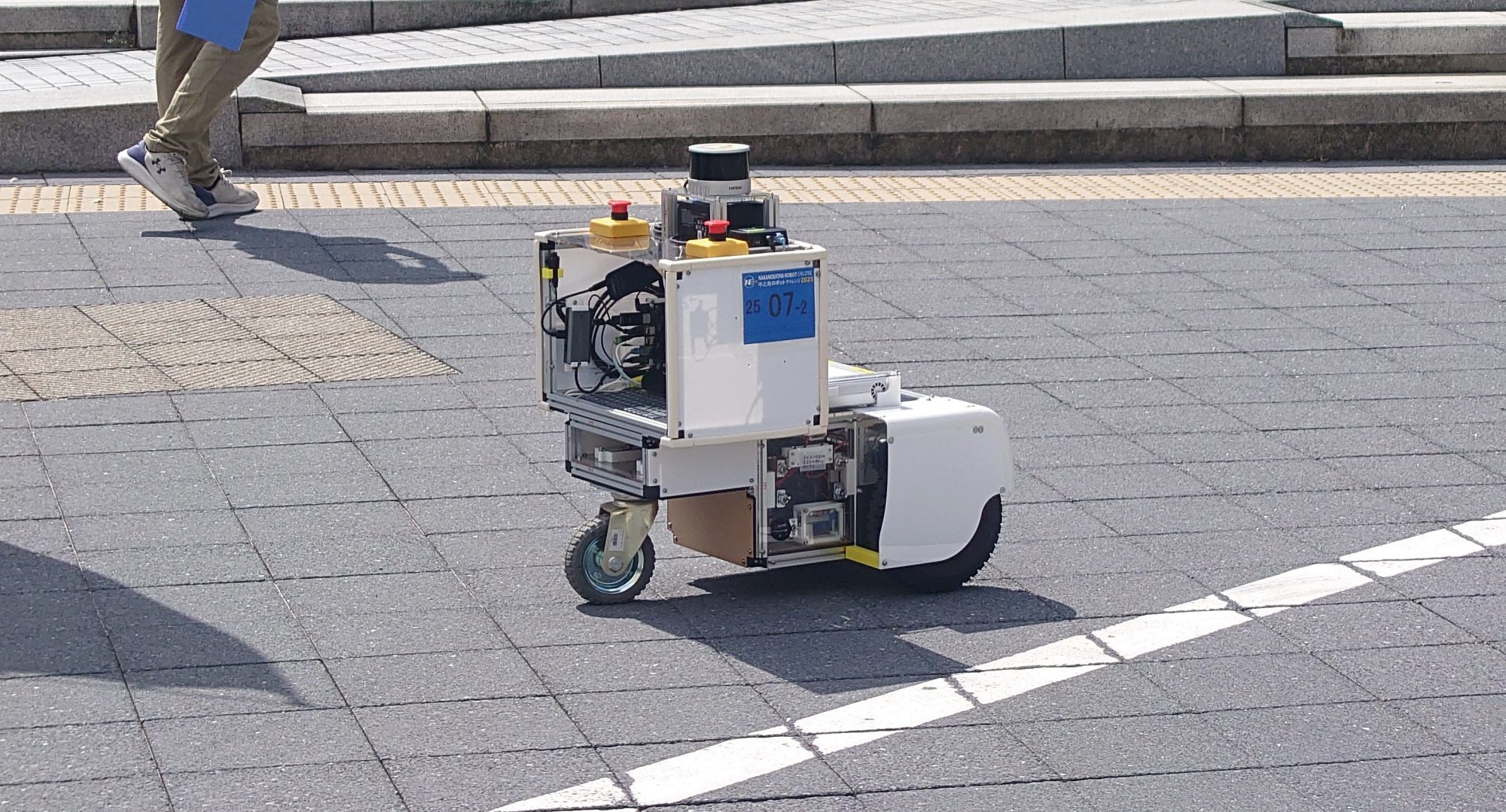
「人間との協調作業が可能な屋内外対応 ゴミ回収支援ロボットの開発」(2022)『インタラクション2022論文集』3D13p.442-445.
「ロボカップジャパンオープン@ホームリーグ ~家庭における生活支援ロボット~」(2016)『システム制御情報学会誌』60(2)p.73-78.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.