腕振り運動の科学
腕振りと体幹のひねりによる歩行補助
工学部
電気電子システム工学科
ロボティクス研究室
田熊隆史
教授
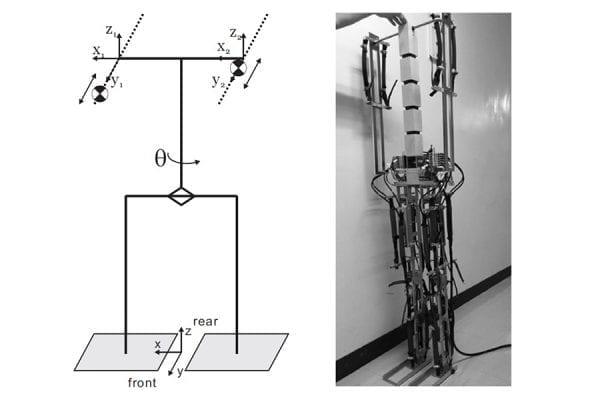
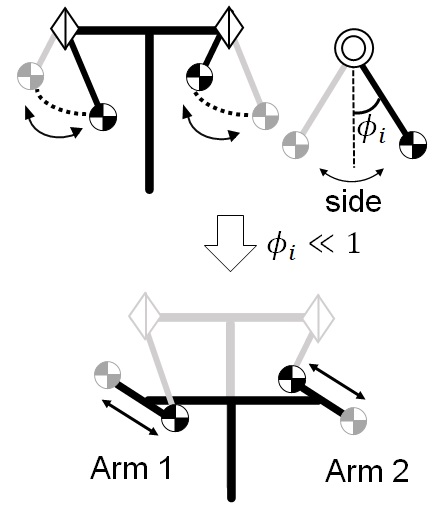
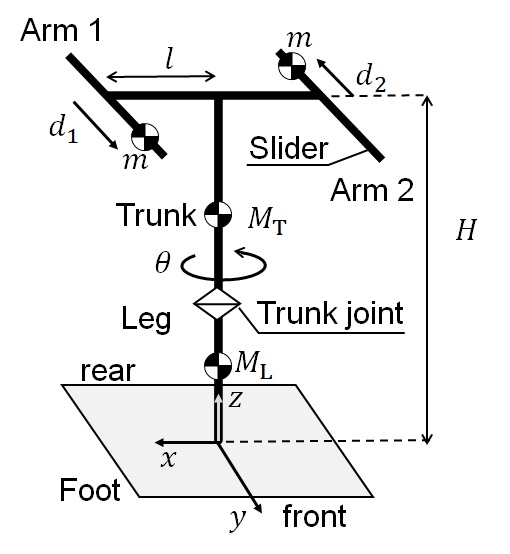
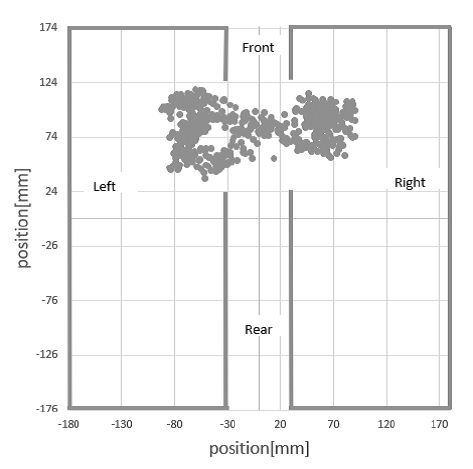
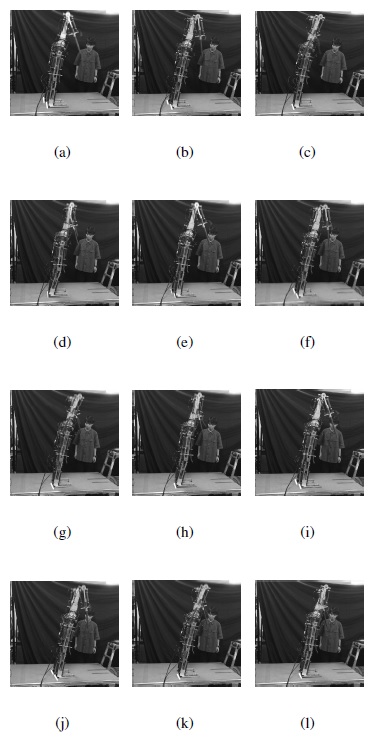
ヒトが歩行時に無意識に行う腕振りや体幹捻りが歩行に及ぼす影響は,まだ解明していない問題の一つです.この問題を解決することでヒト,特に高齢者の運動能力の向上だけでなく,ロボットの新しい運動生成方法の提案など,様々な発展が期待できます.本研究ではヒトの上半身を簡単なモデルで表し,腕の前後方向の振りと,それに応じて回転する体幹の捻りが足裏にかかる力にどのような影響を与えるか調べています.調査の結果,腕は前後対象で無く非対称に振ると良いこと,体幹は柔軟性をもって捻ると良いこと,柔らかさを変えることで二足歩行が促進できることが分かってきました.また二脚歩行ロボットを試作し,歩行が可能であることも分かりました.
論文
「Manipulation of center of pressure for bipedal locomotion by passive twisting of viscoelastic trunk joint and asymmetrical arm swinging」(2023)takumatakashi『International Conference on Intelligent Robots and Systems (IROS 2023)』