With increasing need for nursing and welfare due to an aging population, Osaka Institute of Technology works on academic/practical research and development for the nursing and welfare of tomorrow, based on postgraduate courses that cover a wide range of engineering fields.
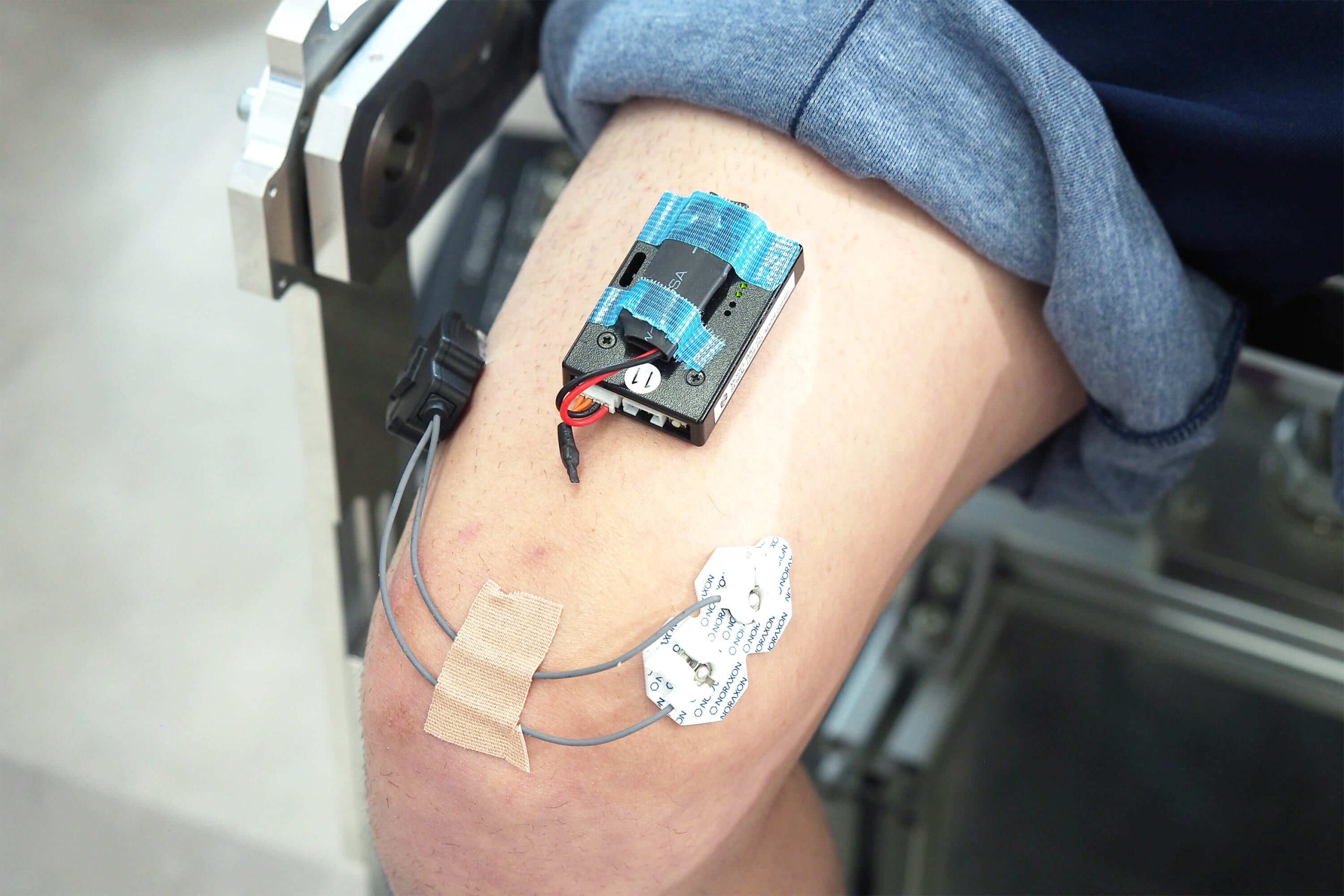
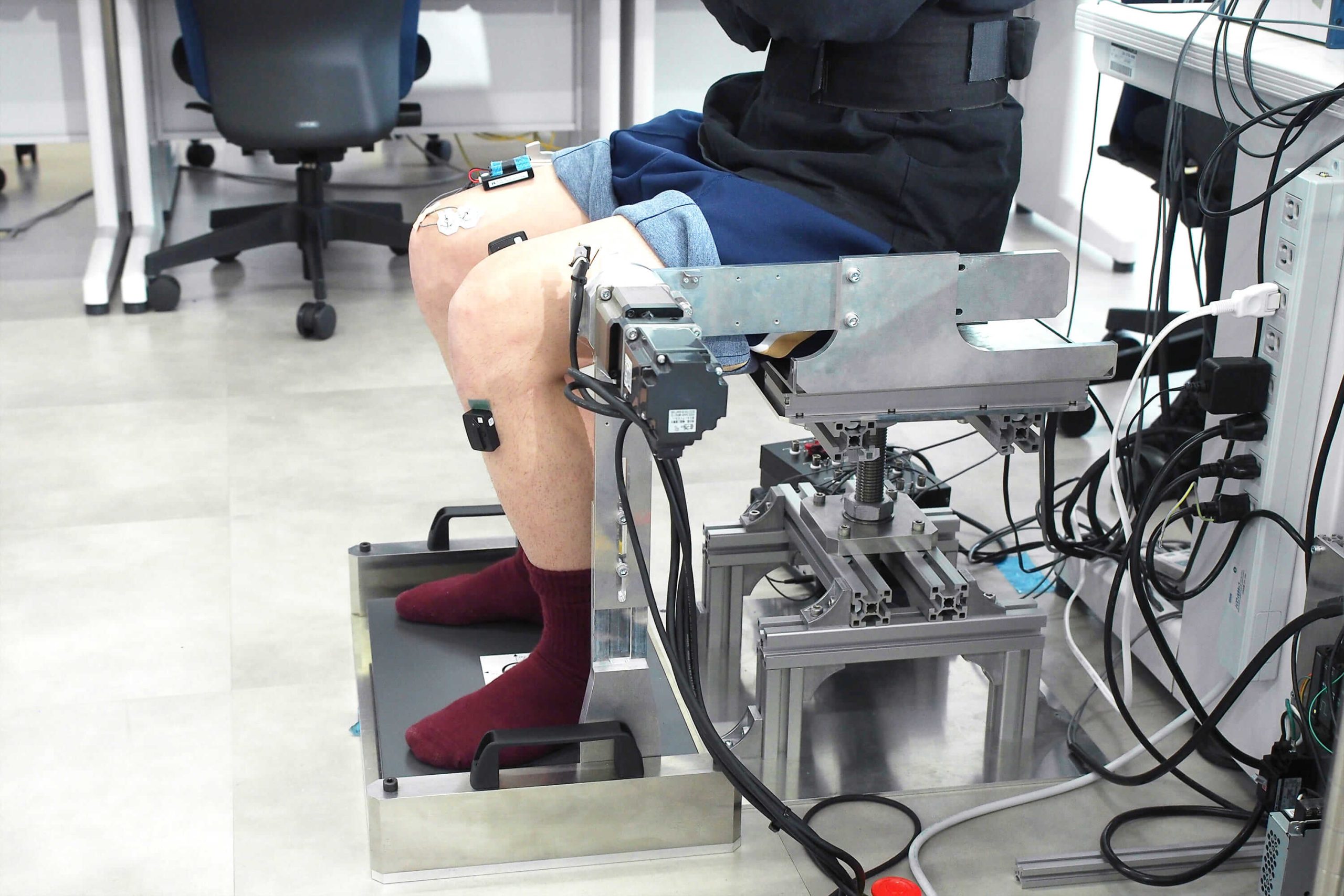
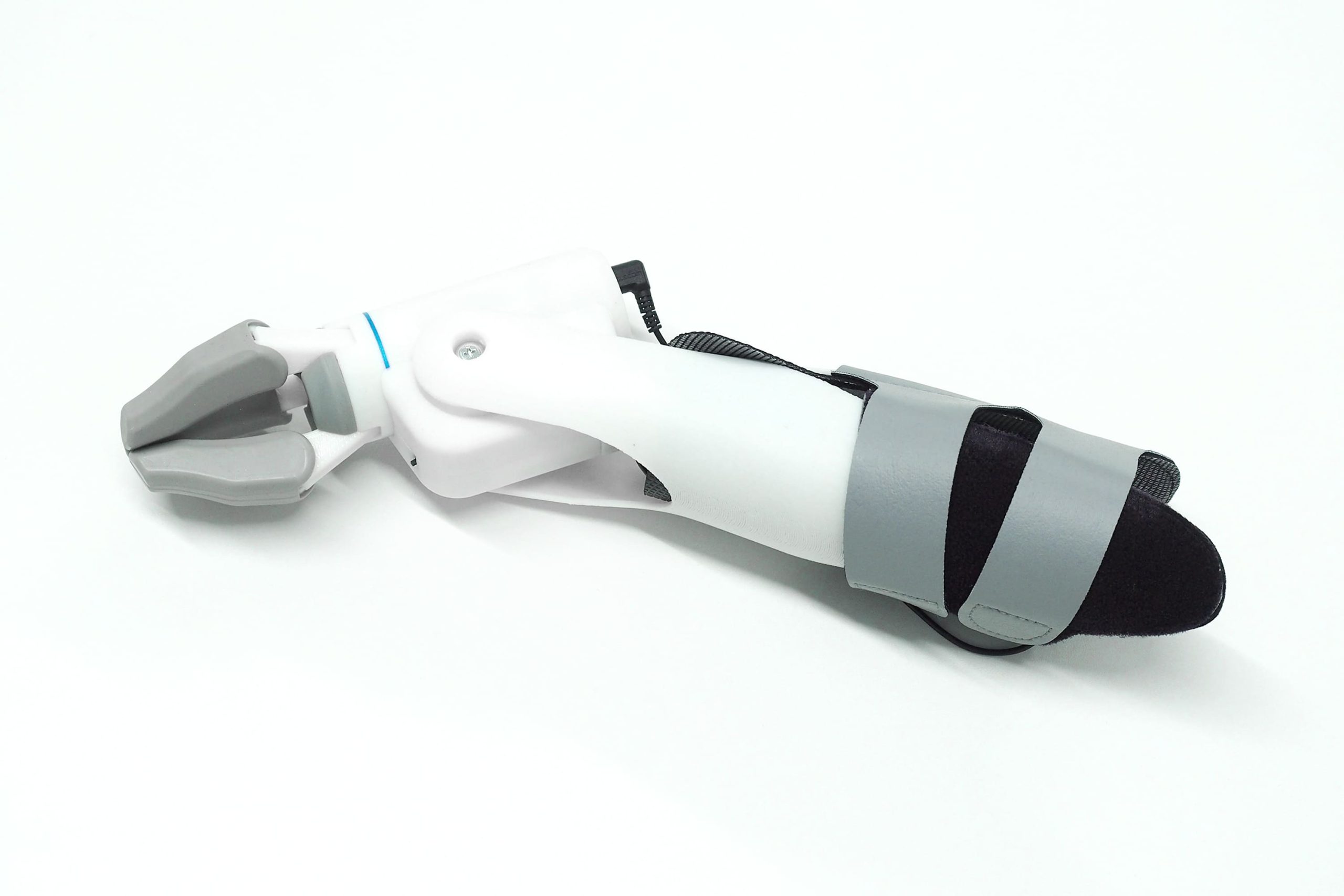
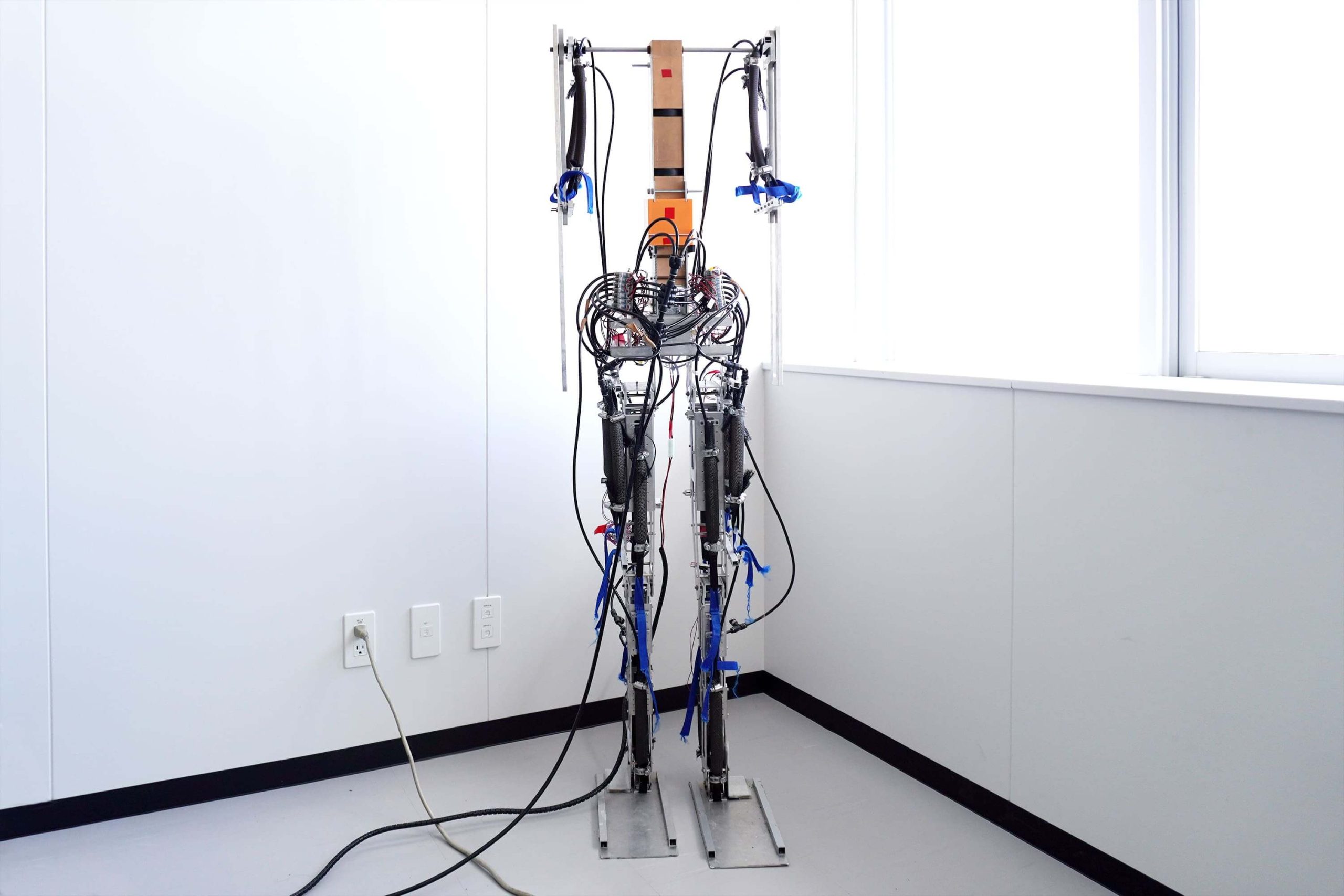
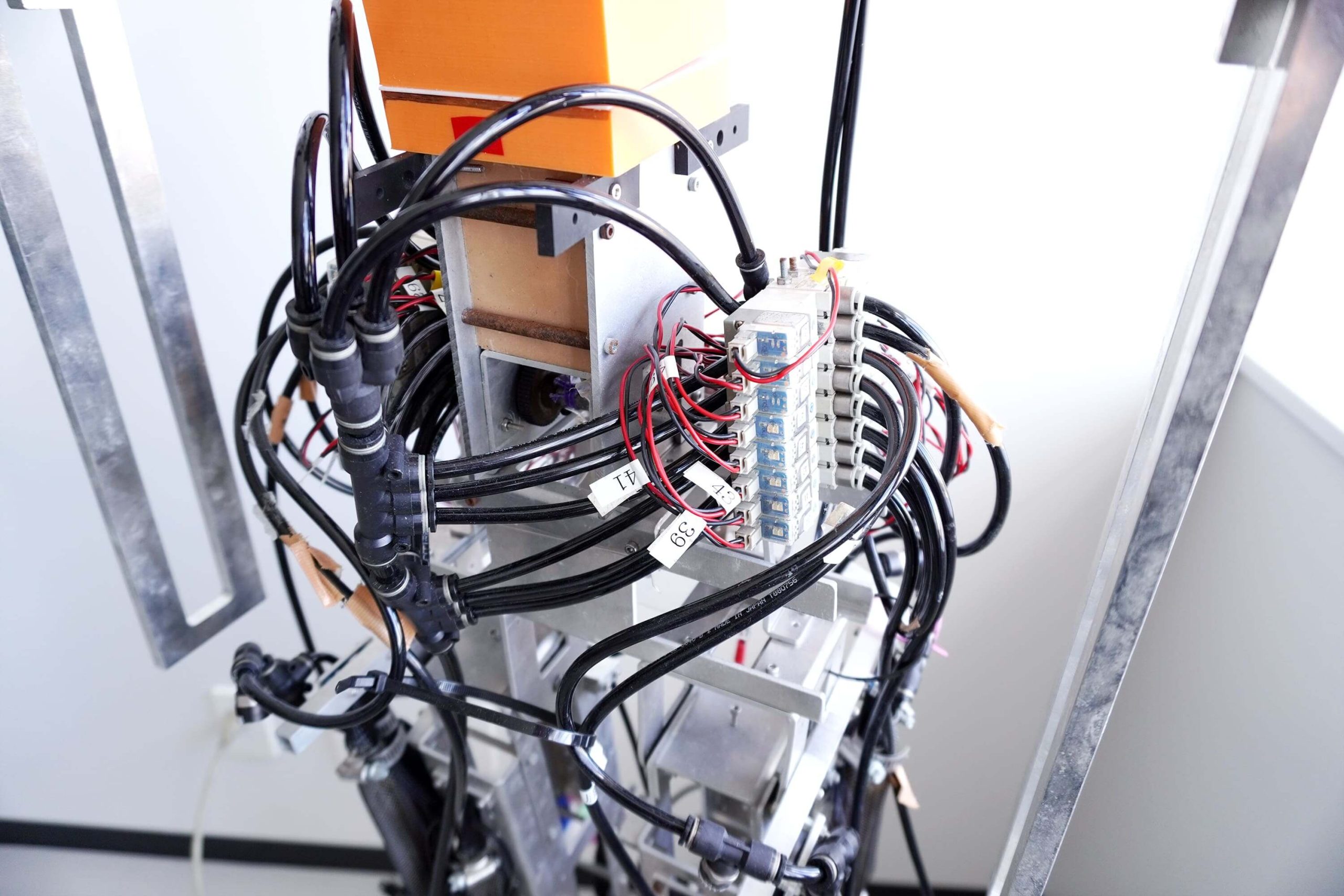
For example, rehabilitation equipment for foot joints that use soft actuators, powered prostheses that utilize digital fabrication such as 3D printing, as well as wheelchairs that can handle steps, new types of walkers for the elderly, and rehabilitation assistance equipment for standing. The field of robotics gives birth to robots with bodies that are flexible like biological organisms and have functions to control those bodies such as brains and nervous systems. Other research is also evolving on a daily basis, such as technologies for human sensing; measuring physical activity and estimating psychological state of human and the development of systems that utilize those technologies, as well as research into how exercise and the ingestion of food affects health.