
医師と協働する手術支援マニピュレータ
本研究室では,患者の傍から近接操作でき,医師と共存協調する手術支援ロボットを,医工・産学連携で研究しています.執刀医が一人で行えるロボット支援手術が実現すれば,少ない医療スタッフでの手術が可能となり(感染症対策,外科医の働き方改革,大規模災害),患者は地元病院で手術を受けられ,診療科の偏在の縮小,医療費の低減にもつながります.
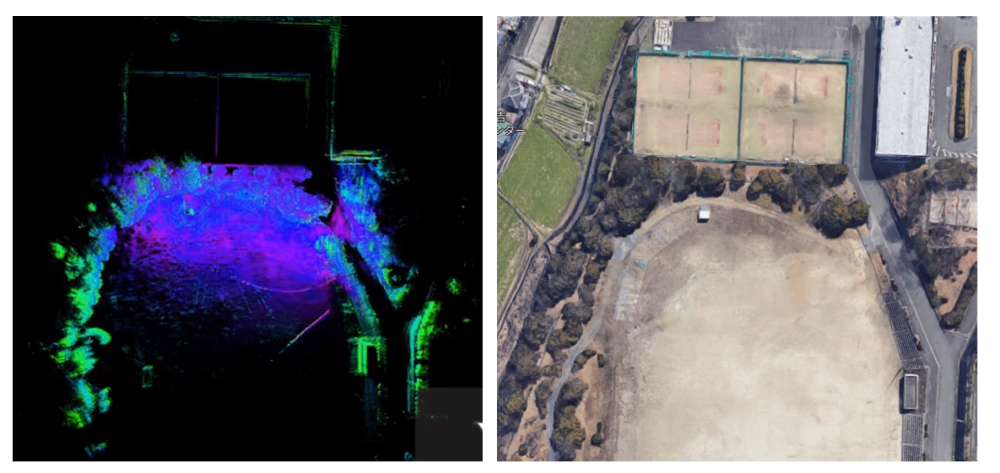
農地や山林での移動に適した中型のクローラロボット「アグリムーバ」を株式会社デザイオ社と共同で研究・開発しています. 雑草除去や作物の運搬等様々な作業に使用可能なロボットで,GNSS(Global Navigation Satellite System:米国の GPS や日本の衛星を含む全球測位衛星システム)や3 次元 LiDAR(光学的な距離計測センサ)を搭載し,ROS(Robot Operating System)にも対応しています. ROSはロボット制御ソフトウェアの効率的な開発を実現するツール・ライブラリ群のセットで,世界中でロボットの研究・開発に利用されているため,様々なソフトウェア資産を活用し容易に機能拡張ができます. 現在は,GNSSによるセンチメートル単位での測位情報に基づく自律走行や,LiDARを用いたSLAM(距離データに基づく環境地図の作成)をすることが可能です.






研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2025 智と技術の見本市.