通孔ポーラス材の簡単な作製方法
半凝固状態を利用してアルミニウム合金の通孔ポーラス材を簡単・安価に作製することができます.半凝固状態で中子棒を引き抜くだけで,通孔ポーラス材を作製できます.孔形状は例えば“L”字型も可能です.通孔の最小径の実績は0.5mmです.平行な通孔だけではなく,異なる方向の通孔も開けることができます.従来のポーラス材より長い通孔を開けることができます.直径5mmの通孔では長さ500mmの実績があります.
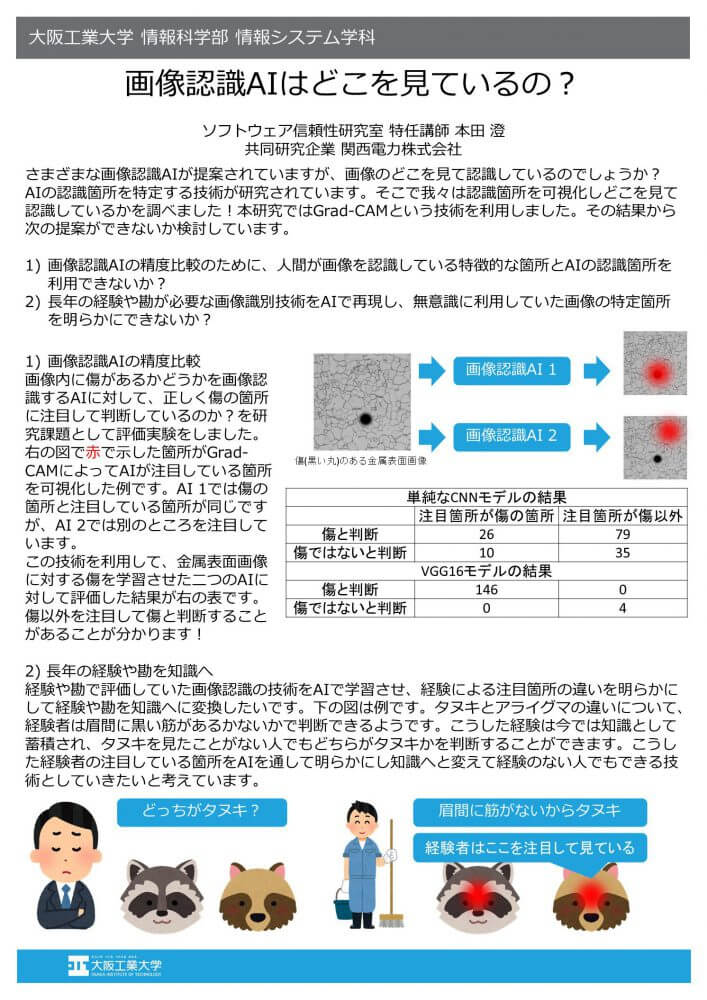
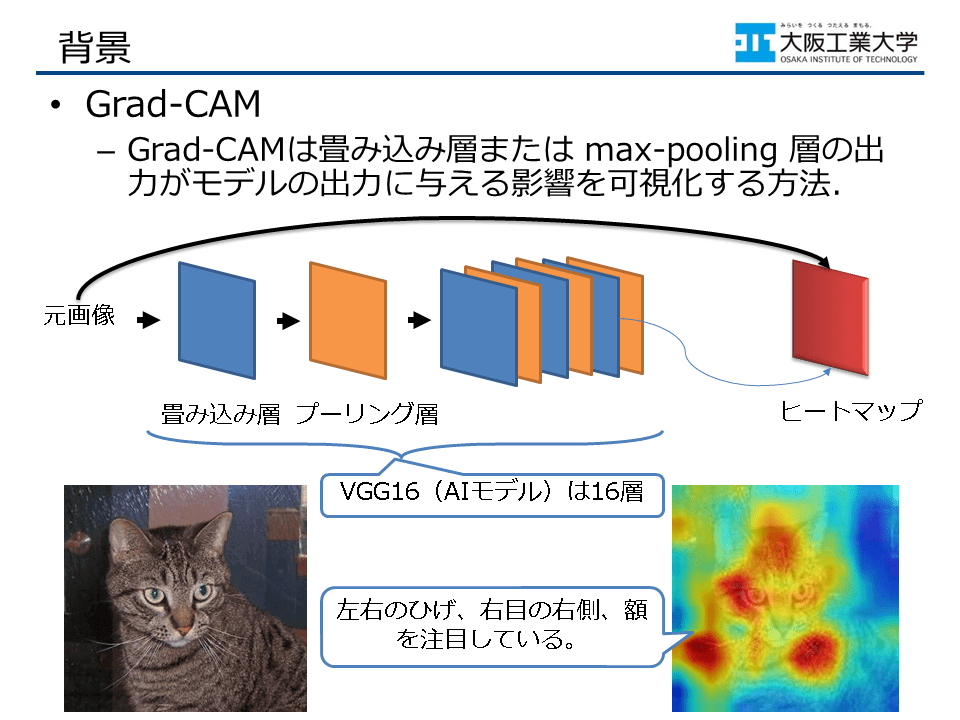
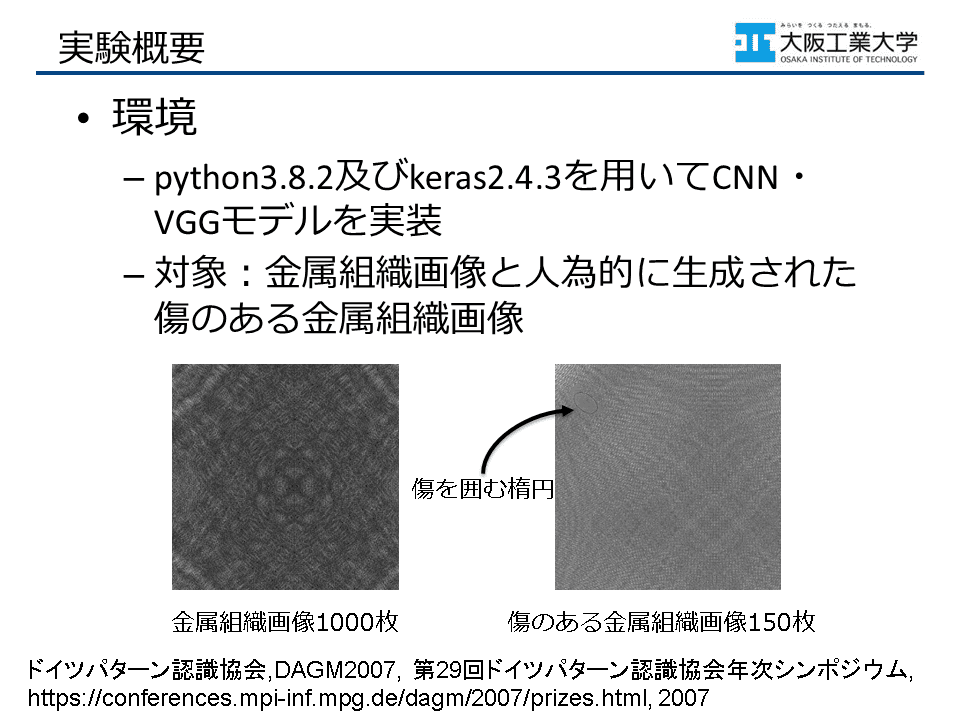
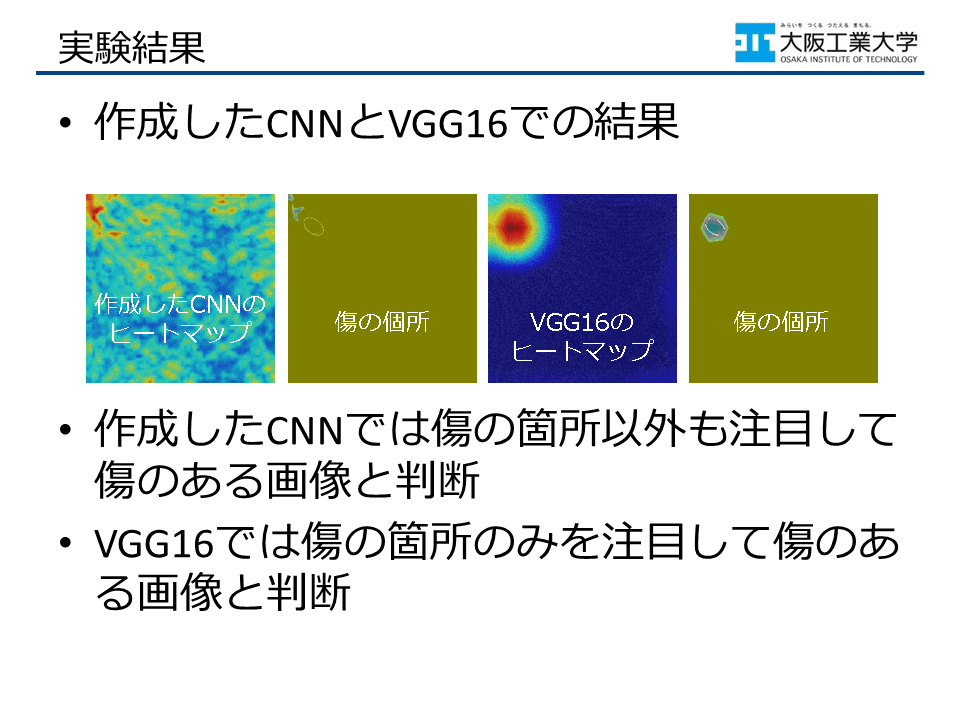
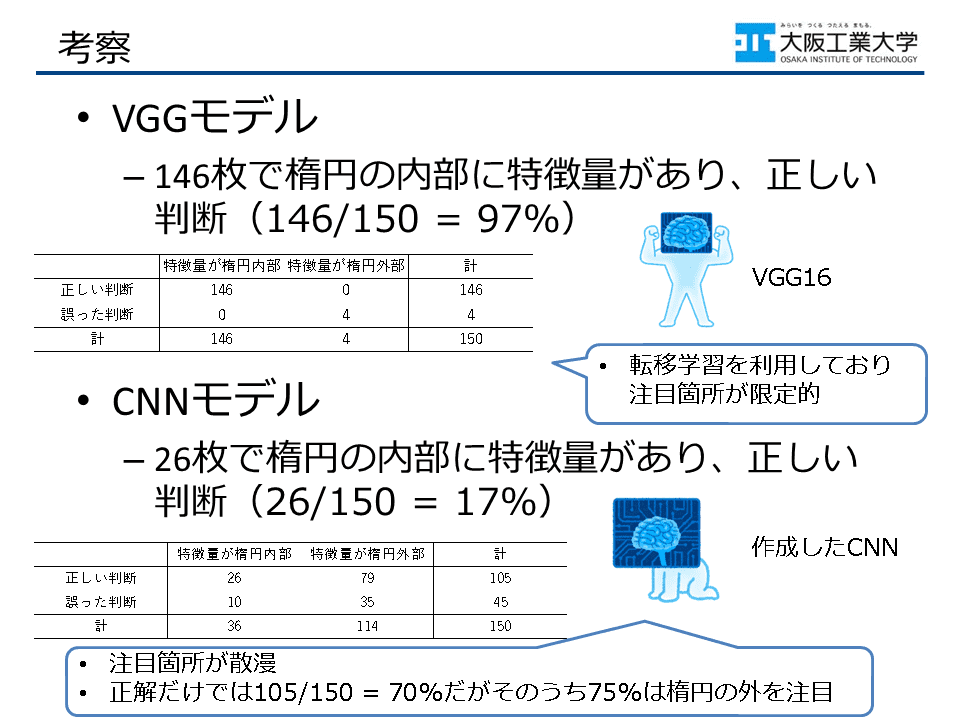
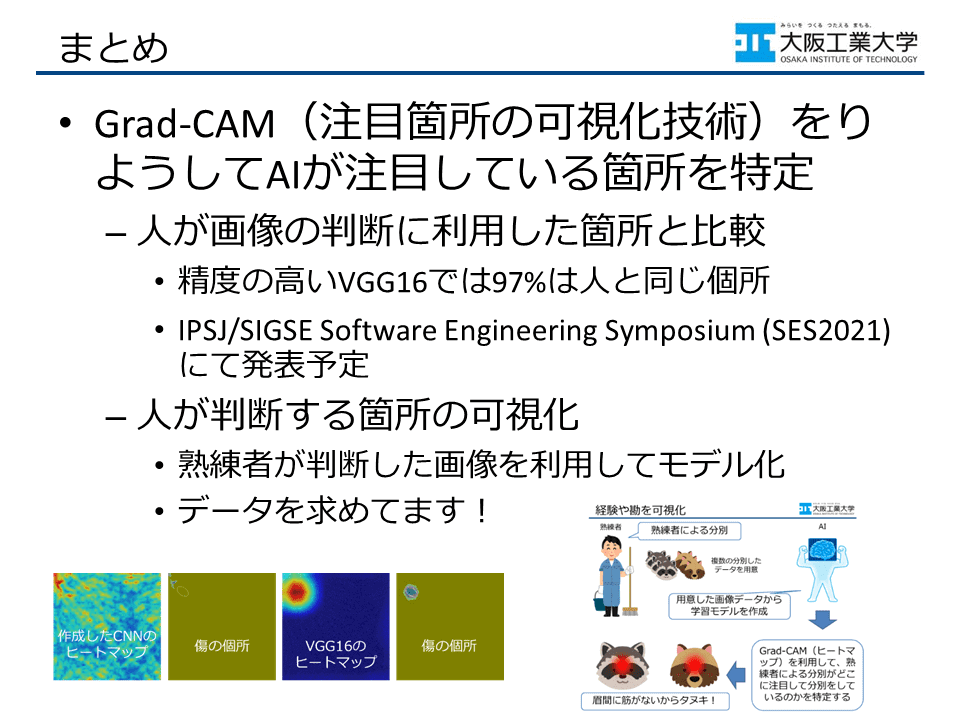
さまざまな画像認識AIが提案されていますが、画像のどこを見て認識しているのでしょうか?本研究ではAIの認識箇所を特定する技術であるGrad-CAMを利用して認識箇所を可視化し、どこを見て認識しているかを調べました!その結果から次の提案を考えています。1)画像認識AIの精度比較のために、人間が画像を認識している特徴的な箇所とAIの認識箇所を利用する。2)長年の経験や勘が必要な画像識別技術をAIで再現し、無意識に利用していた画像の特定箇所を明らかにする。
論文
「画像認識AIはどこを見ているの?」(2021)『MOBIO産学連携オフィス テーマ別合同シーズ発表会『情報処理・AI編』』
「Grad-CAMを利用した画像認識AIに対する注目箇所特定手法の提案と評価」(2021)『ソフトウェアエンジニアリングシンポジウム2021』p.1-2.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2026 智と技術の見本市.