遺伝的アルゴリズムによる地上放送システムの無線資源割り当て最適化技術
本技術のコアは,遺伝的アルゴリズムを用いて放送局の送信電力と使用チャネルを割り当てる際,膨大な地図情報を取り入れると計算不能になるため,各局の放送エリアを簡単に近似できる数学モデルを構築し,これを最適化アルゴリズムに入れることで,計算を可能にする.
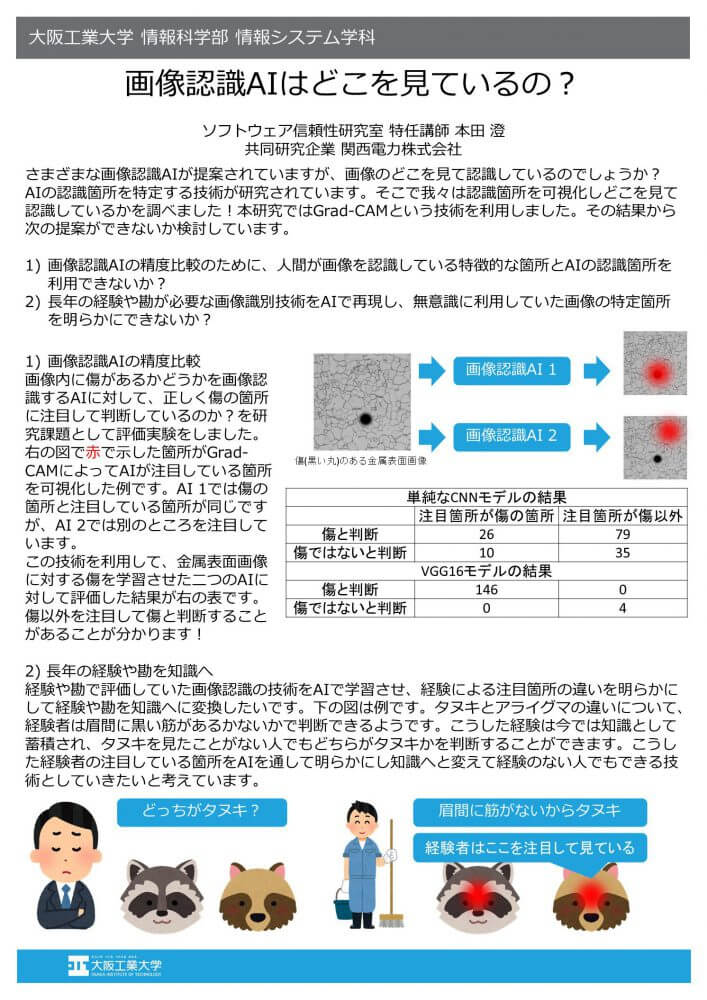
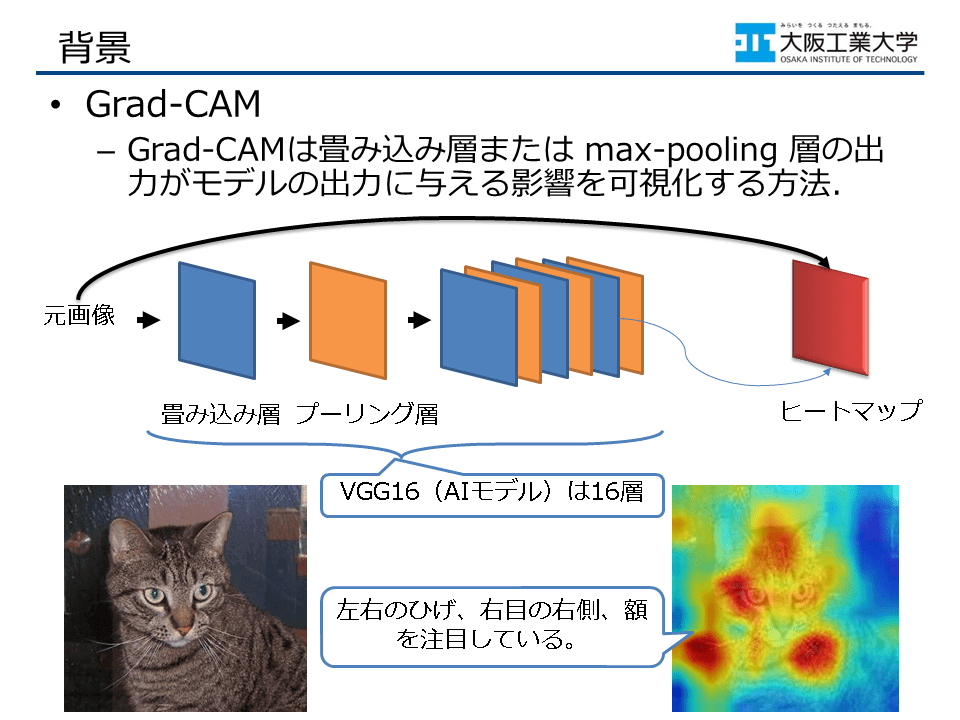
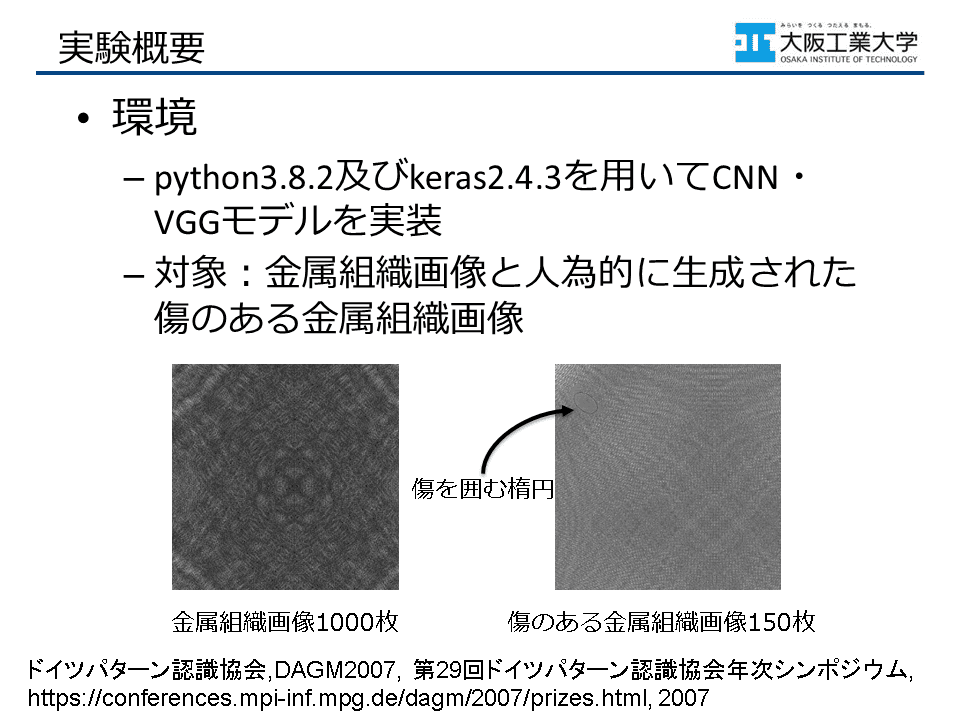
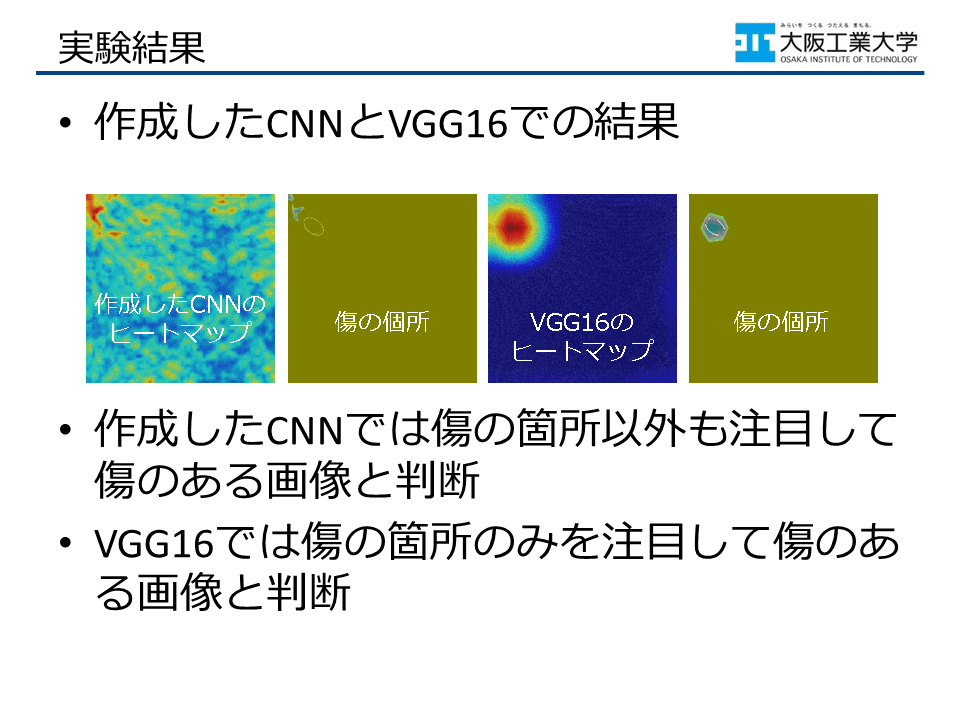
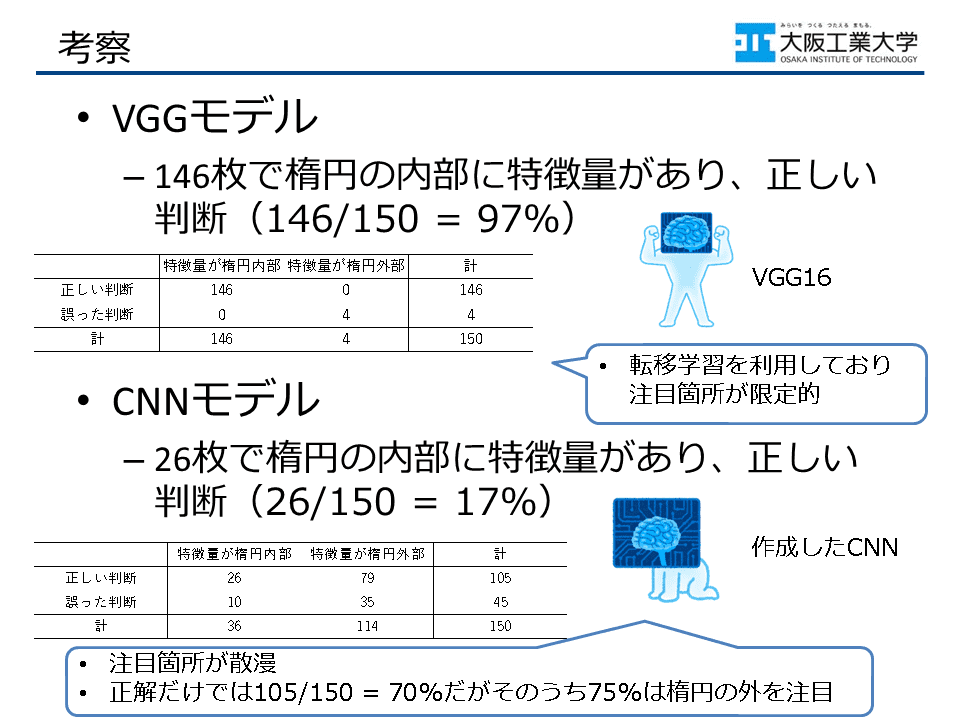
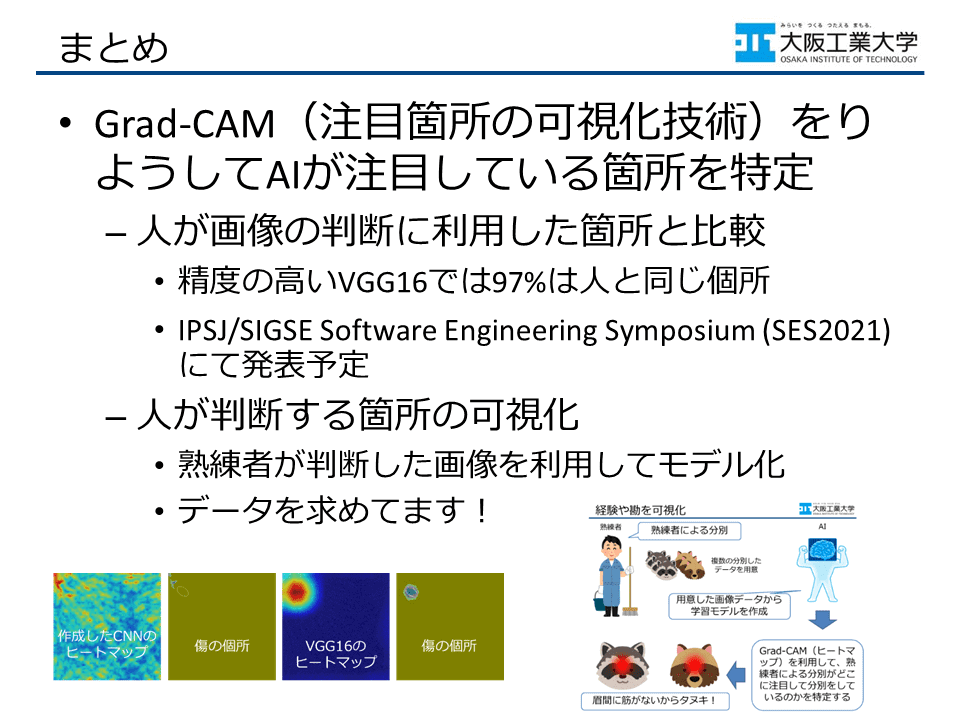
さまざまな画像認識AIが提案されていますが、画像のどこを見て認識しているのでしょうか?本研究ではAIの認識箇所を特定する技術であるGrad-CAMを利用して認識箇所を可視化し、どこを見て認識しているかを調べました!その結果から次の提案を考えています。1)画像認識AIの精度比較のために、人間が画像を認識している特徴的な箇所とAIの認識箇所を利用する。2)長年の経験や勘が必要な画像識別技術をAIで再現し、無意識に利用していた画像の特定箇所を明らかにする。
論文
「画像認識AIはどこを見ているの?」(2021)『MOBIO産学連携オフィス テーマ別合同シーズ発表会『情報処理・AI編』』
「Grad-CAMを利用した画像認識AIに対する注目箇所特定手法の提案と評価」(2021)『ソフトウェアエンジニアリングシンポジウム2021』p.1-2.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2026 智と技術の見本市.