キノコの機能を成分化学的に解明する
きのこは古くから万病予防の健康食材として利用され、漢方薬や健康補助食品の有効成分としても配合されていますが、その効能が必ずしも分子レベルで解明されているわけではありません。私たちは類例のない抗認知症作用をもつきのこ「ヤマブシタケ」に注目し、その特徴的な有機低分子成分の化学合成と生物活性検定によってきのこの効能を単分子レベルで理解・解明することを目指しています。今までに30種以上の低分子成分を合成し、そのいくつかに神経細胞保護効果があることを見出しました。
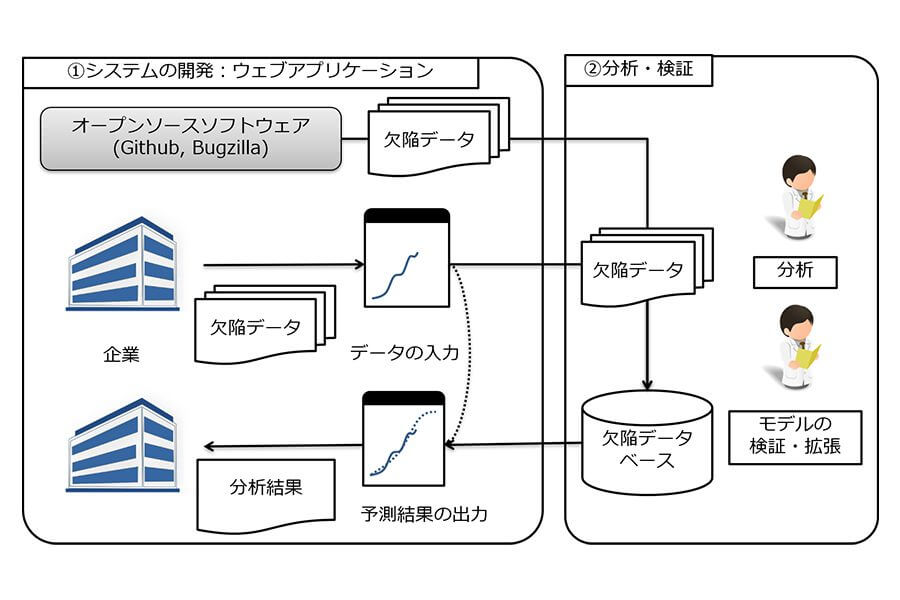
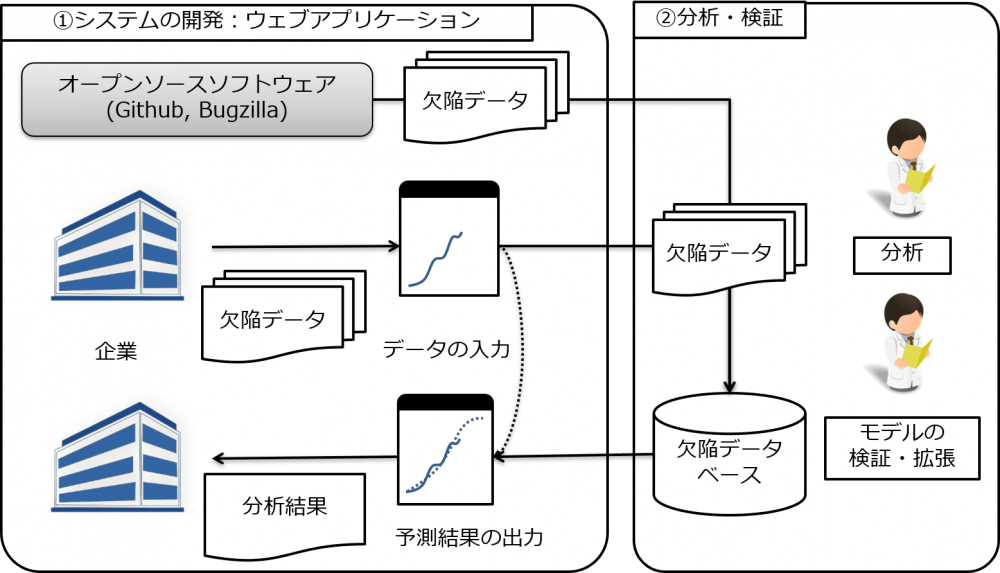
本研究では様々なドメインや開発スタイルに属するソフトウェア開発に対して有効なソフトウェア信頼性モデルを構築し活用方法を広く普及することでソフトウェア開発をより効果的で制御可能とすること目的とします。そのためには多くの企業の開発データの収集方法および普及方法としてウェブアプリケーションの開発が必要です。また企業の開発データのみならずオープンソースソフトウェアにおける開発データも対象とします。本研究を行うことで現在困難とされている開発スケジュールの定量的な決定に役立つと考えられます。
論文
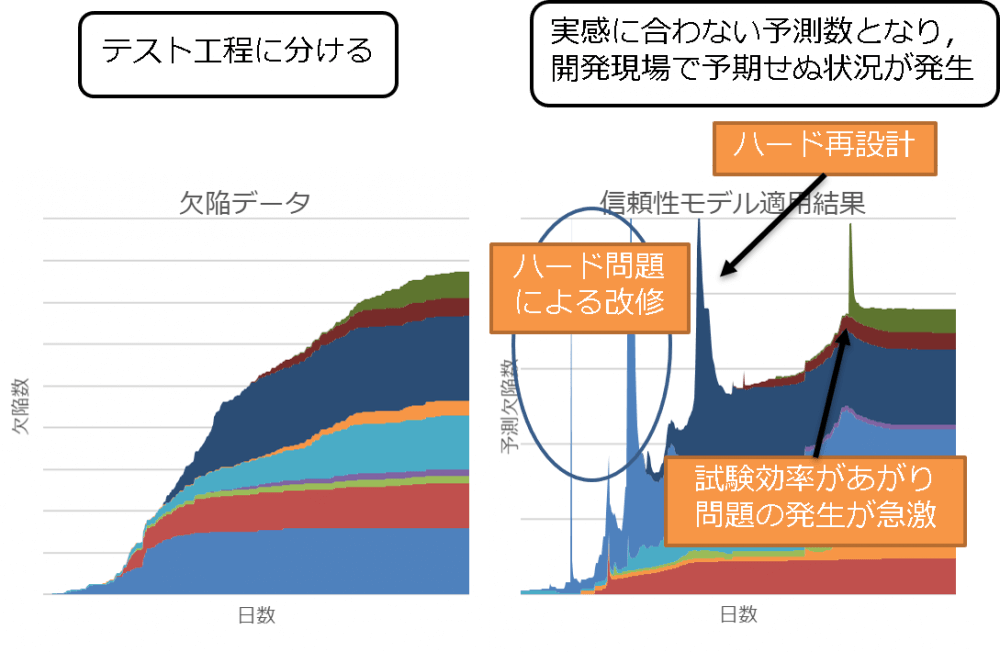
「Detection of Unexpected Situations by Applying Software Reliability Growth Models to Test Phases」(2015)『2015 IEEE International Symposium on Software Reliability Engineering Workshops (ISSREW)』p.2-5.
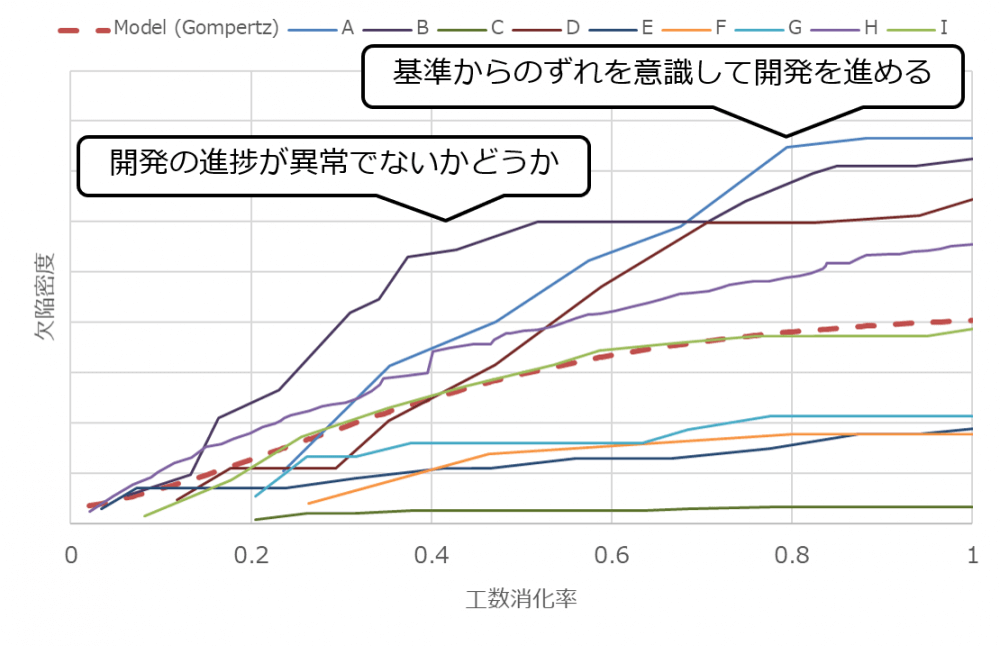
「Case Study: Project Management Using Cross Project Software Reliability Growth Model Considering System Scale」(2016)『2016 IEEE International Symposium on Software Reliability Engineering Workshops (ISSREW)』p.41-44.
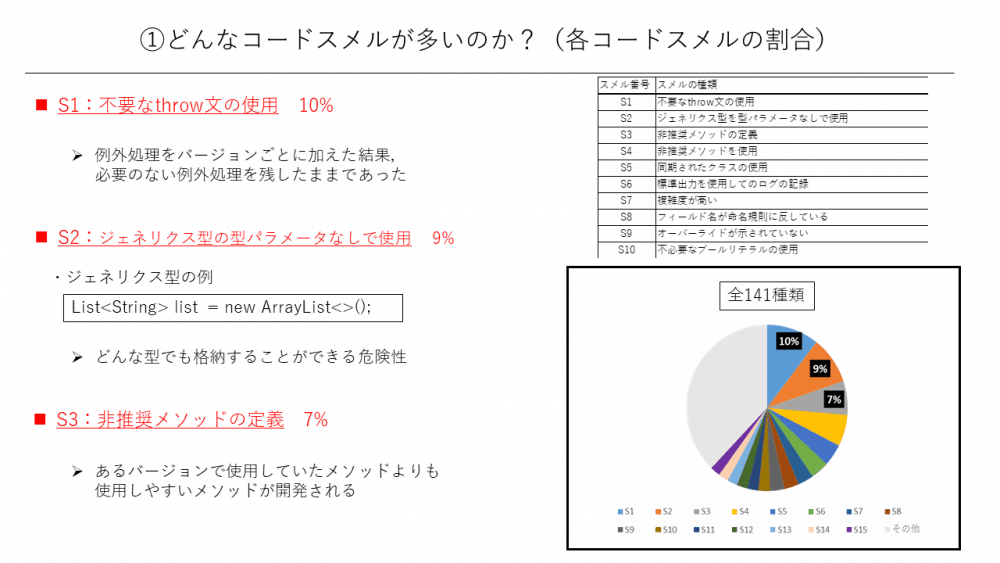
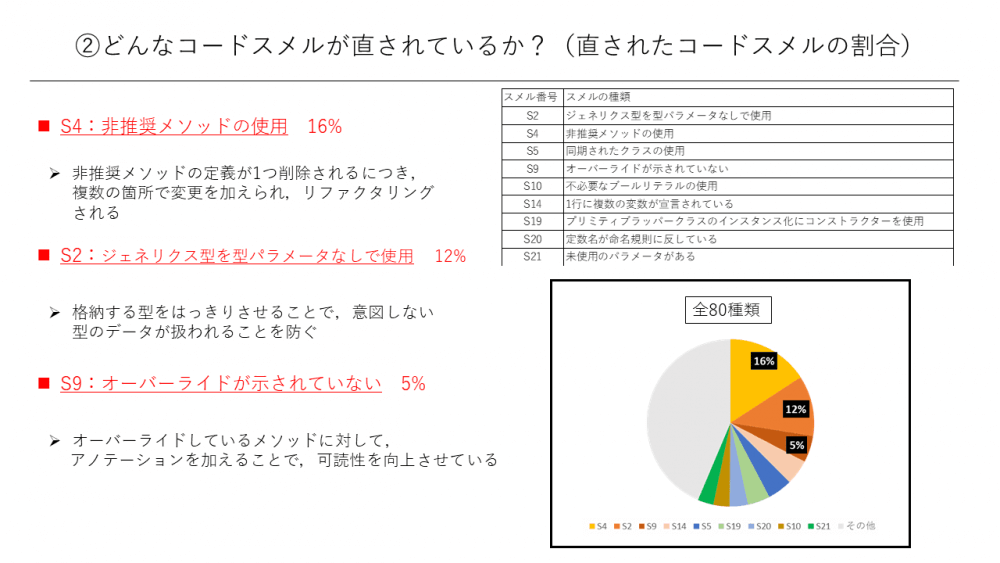
「オープンソースソフトウェアにおけるCode Smellと対応するリファクタリングの特徴に関する調査」(2021)『ソフトウェアエンジニアリングシンポジウム2021』
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2026 智と技術の見本市.