
トモグラフィー画像の3次元可視化プログラムの作成
X線CTやMRIなどで撮影したトモグラフィー像(断層画像)の中から,注目領域だけを検出したり,立体構造を想像することは容易ではありません.画像処理技術や手法の応用により,注目領域のセグメンテーションとラベリング,立体構造の再構成を行い,三次元可視化するためのソフトウェアの開発に取り組んでいます.
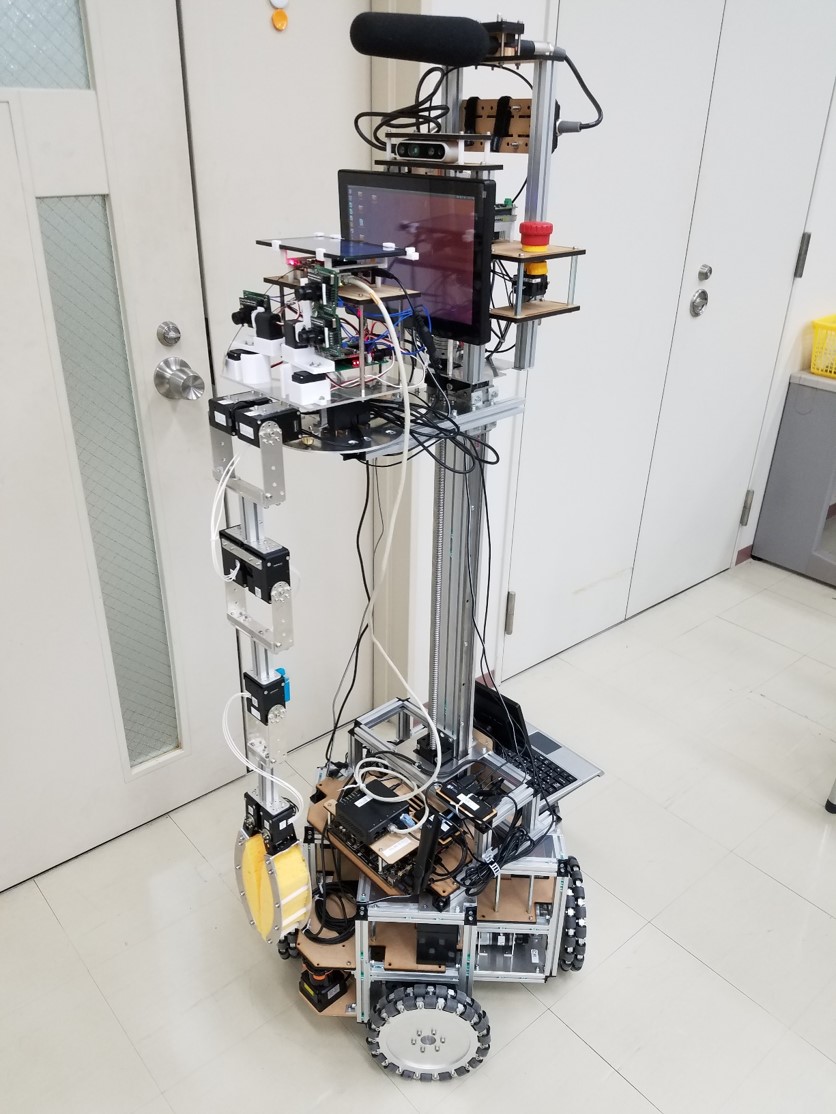
大阪工業大学情報科学部では中之島ロボットチャレンジという屋外での自律走行ロボットの競技に2021年から参加し,PBLのテーマとして活用しています. PBLにおいては小型の車輪移動ロボットと大型の競技用ロボットを使い分け,効率的に学習を進められるように配慮しています.また,高価な市販ロボットを購入する必要がないよう,屋内外で手軽に実験可能なロボットを独自に設計・製作して利用しています。 車輪移動型ロボットに装着するアーム等も製作しており、様々なPBL用ロボットの製作ノウハウを有しています.



論文
「Online learning environment for robotics programming using ROS simulator」(2022)『Proceedings of the 10th IIAE International Conference on Industrial Application Engineering』p.203-207.
「人間との協調作業が可能な屋内外対応 ゴミ回収支援ロボットの開発」(2022)『インタラクション2022論文集』3D13p.442-445.
「ロボカップジャパンオープン@ホームリーグ ~家庭における生活支援ロボット~」(2016)『システム制御情報学会誌』60(2)p.73-78.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2022 智と技術の見本市.