ドローンの閉ループシステム同定によるモデリングと飛行制御
幅広い産業でビッグデータの活用が進んでいるが,予測・診断・制御・意思決定の精度向上に際してモデルの重要性が近年ますます高まっている.データエンジニアリングのひとつの分野として,システム同定法によるデータ駆動モデリングについて紹介する.具体例として,MOESP型閉ループ部分空間同定法(CL-MOESP)によるドローンの閉ループ同定と,得られた同定モデルを利用した最適制御器設計の事例研究を紹介する.
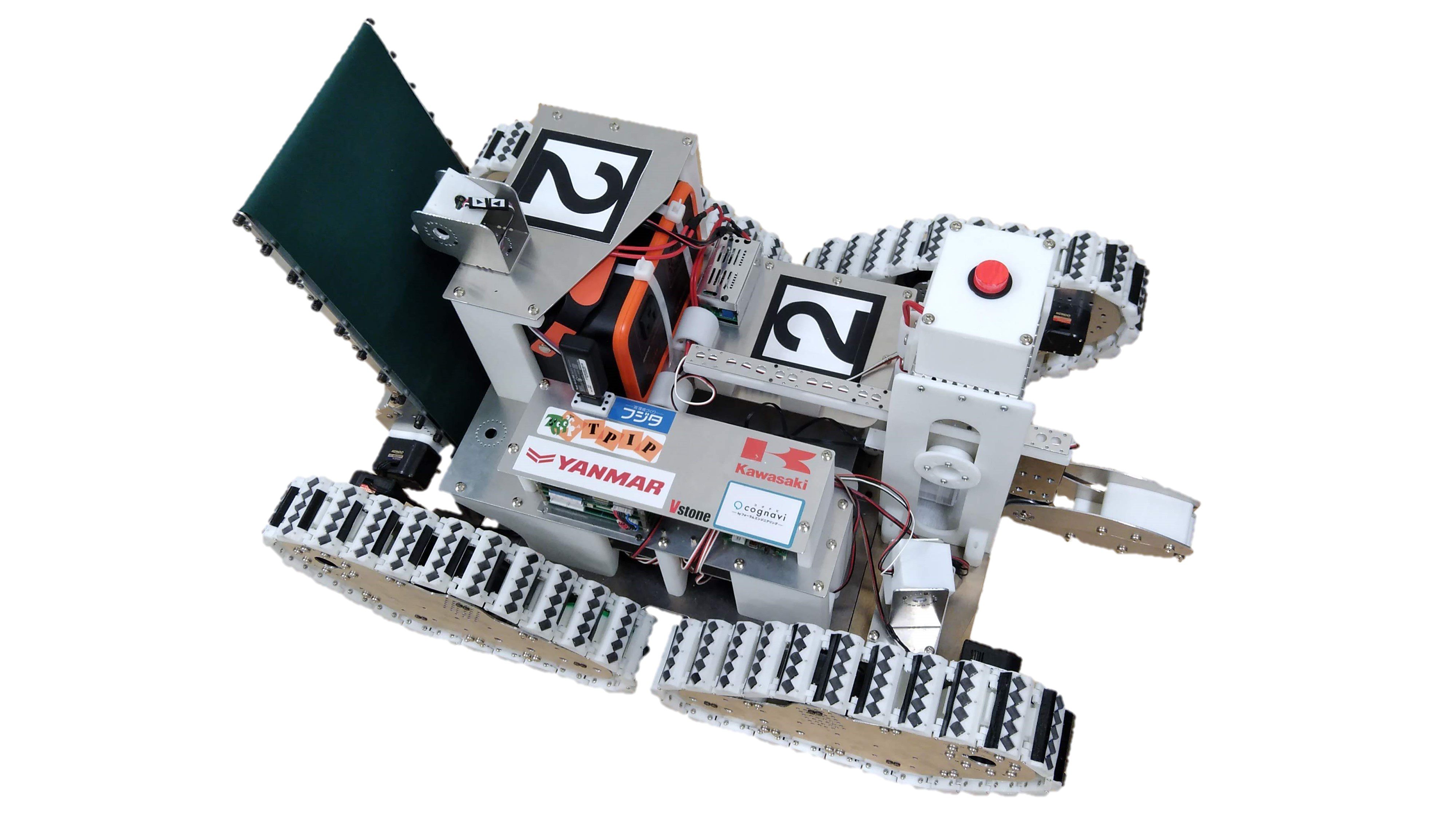
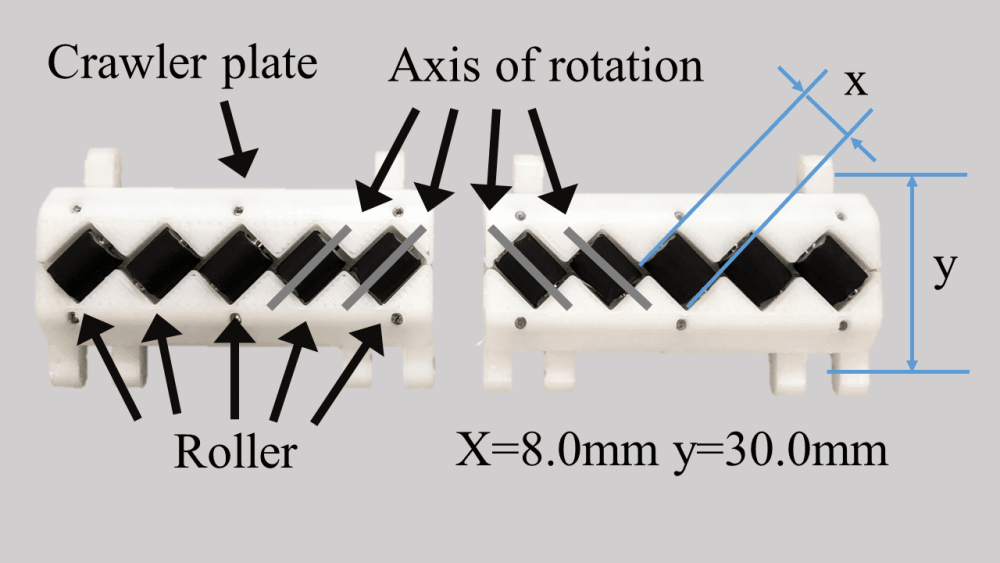
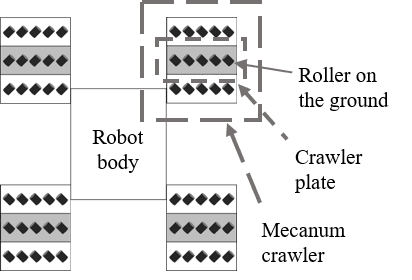
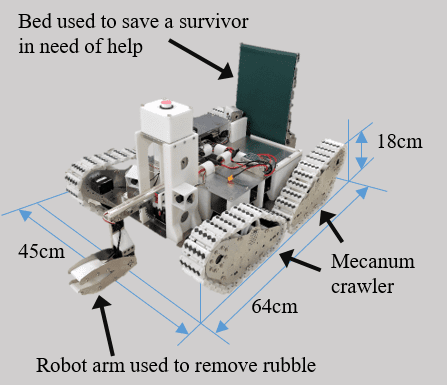
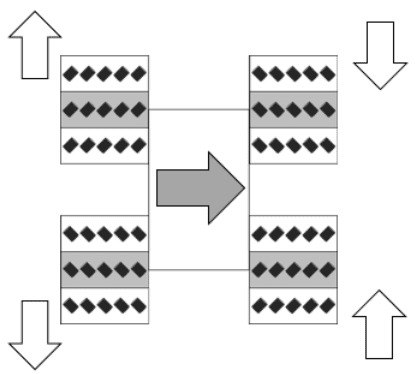
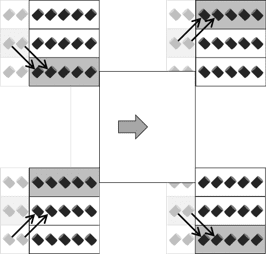
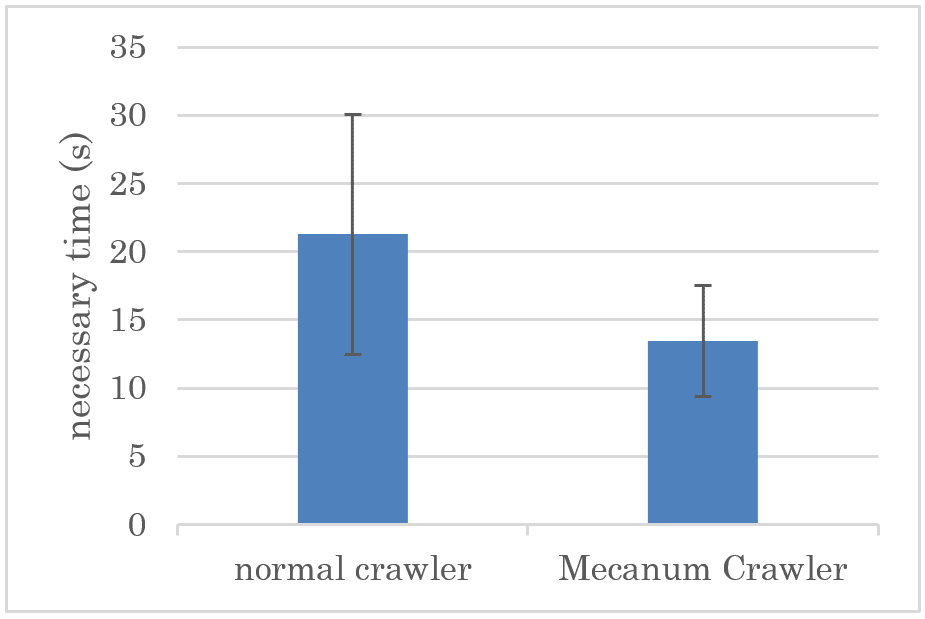
ロボットの移動機構においては不整地や段差の走破性能と,精密な位置調整が可能な全方向移動の機能を有するのが望ましい.本研究ではレスキューロボットなどの移動機構として「メカナムクローラ」を提案する.メカナムクローラとは,メカナムホイールの機能とクローラの利点を併せ持つ全方向移動機構である.クローラの利点を生かし,大きな段差を登ることができることに加え,横移動などの全方向移動が可能となった.


論文
「メカナムホイールとクローラの性能を併せ持つ全方向移動機構メカナムクローラの提案」(2021)『【発表要旨集】 第22回 計測自動制御学会 システムインテグレーション部門講演会』1A2p.1A2-04.
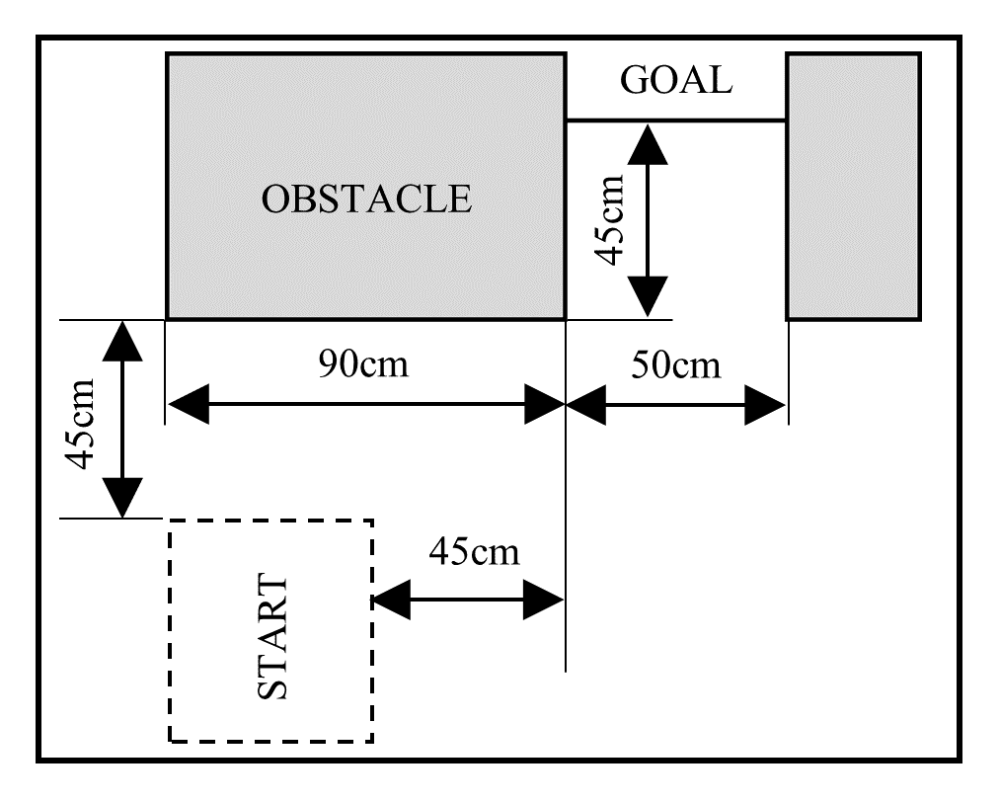
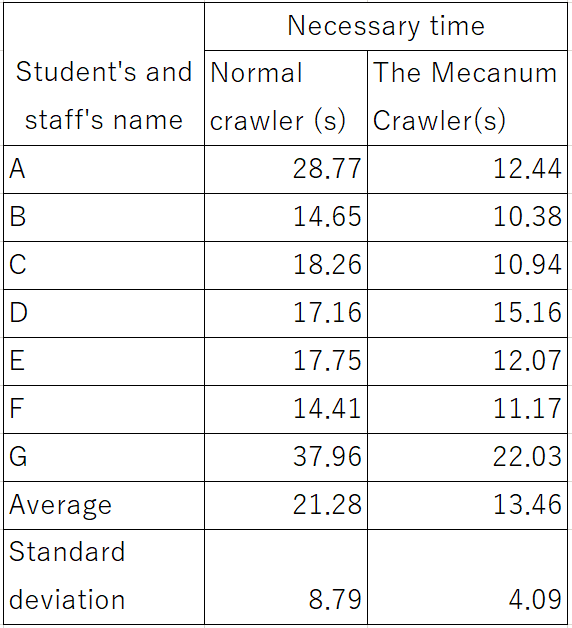
「全方向移動機構メカナムクローラの性能評価」(2022)『【発表要旨集】 第23回 計測自動制御学会 システムインテグレーション部門講演会』1P3-Gp.1P3-G08.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2022 智と技術の見本市.