分極デバイス応用を目指した酸化ガリウム薄膜の研究
ワイドバンドギャップ半導体としてパワーデバイスや深紫外線検出器への応用が期待される酸化ガリウム薄膜に注目しています。特に準安定相構造の一つである ε 相の酸化ガリウムは自発分極による分極デバイスへの応用が期待されます。準安定相の成膜に適した手法であるミストCVD法を用いた高品質な薄膜の成膜とそのデバイス応用を検討しています。
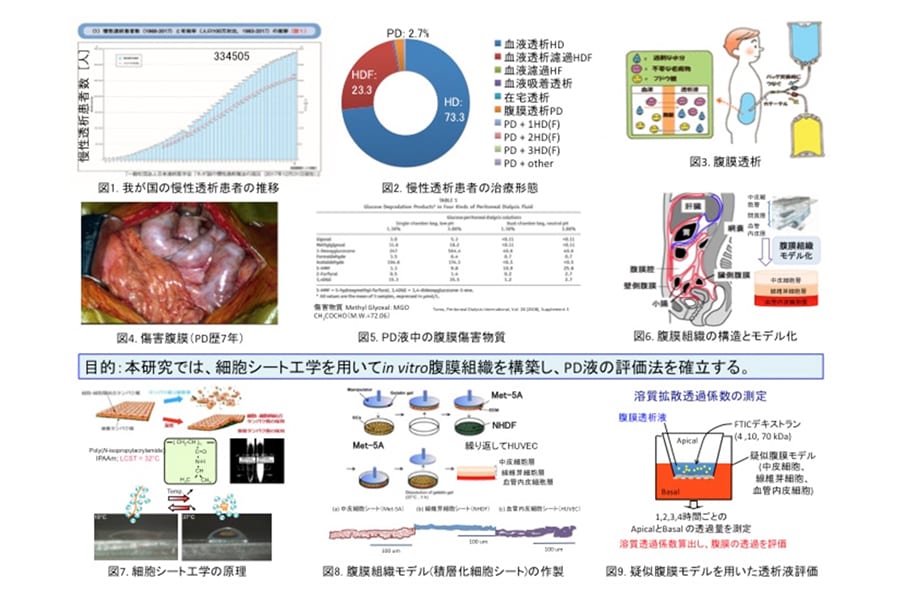
腹膜は中皮細胞、間質層、基底膜、血管から成りたちます。そこで、本技術は、腹膜を中皮細胞層、間質層、血管内皮層にわけて、それぞれの層を中皮細胞、線維芽細胞、血管内皮細胞を用いて作成します。それらを温度感受性培養皿とゼラチン積層化法を用いて、順に積層化することで、体の外で人工腹膜組織を構築します。さらに、腹膜で重要になる溶質の透過や中皮細胞の剥離などをトランスウェルを用いて評価します。 ・通常は1層しか評価できないが、本技術は異なる細胞で3層に積層化した人工腹膜を作成可能 ・積層化した人工腹膜をトランスウェル上に移すことで、溶質透過試験にて腹膜の傷害と溶質透過係数の関係図を作成可能

論文
「Hepatocyte Growth Factor-Secreting Mesothelial Cell Sheets Suppress Progressive Fibrosis in a Rat Model of CKD.」(2019)『Journal of American Society Nephrology』30p.261.
「Peritoneal cell sheets composed of mesothelial cells and fibroblasts prevent intra‐abdominal adhesion formation in a rat model.」(2016)『Journal of tissue engineering and regenerative medicine』10p.855.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2022 智と技術の見本市.