高齢者人口の増加を背景に、介護・福祉へのニーズが増大する中、大阪工業大学では工学の幅広い分野を網羅する研究科をベースとして、明日の介護・福祉に活かせる学際的・実用的な研究開発に取り組んでいます。
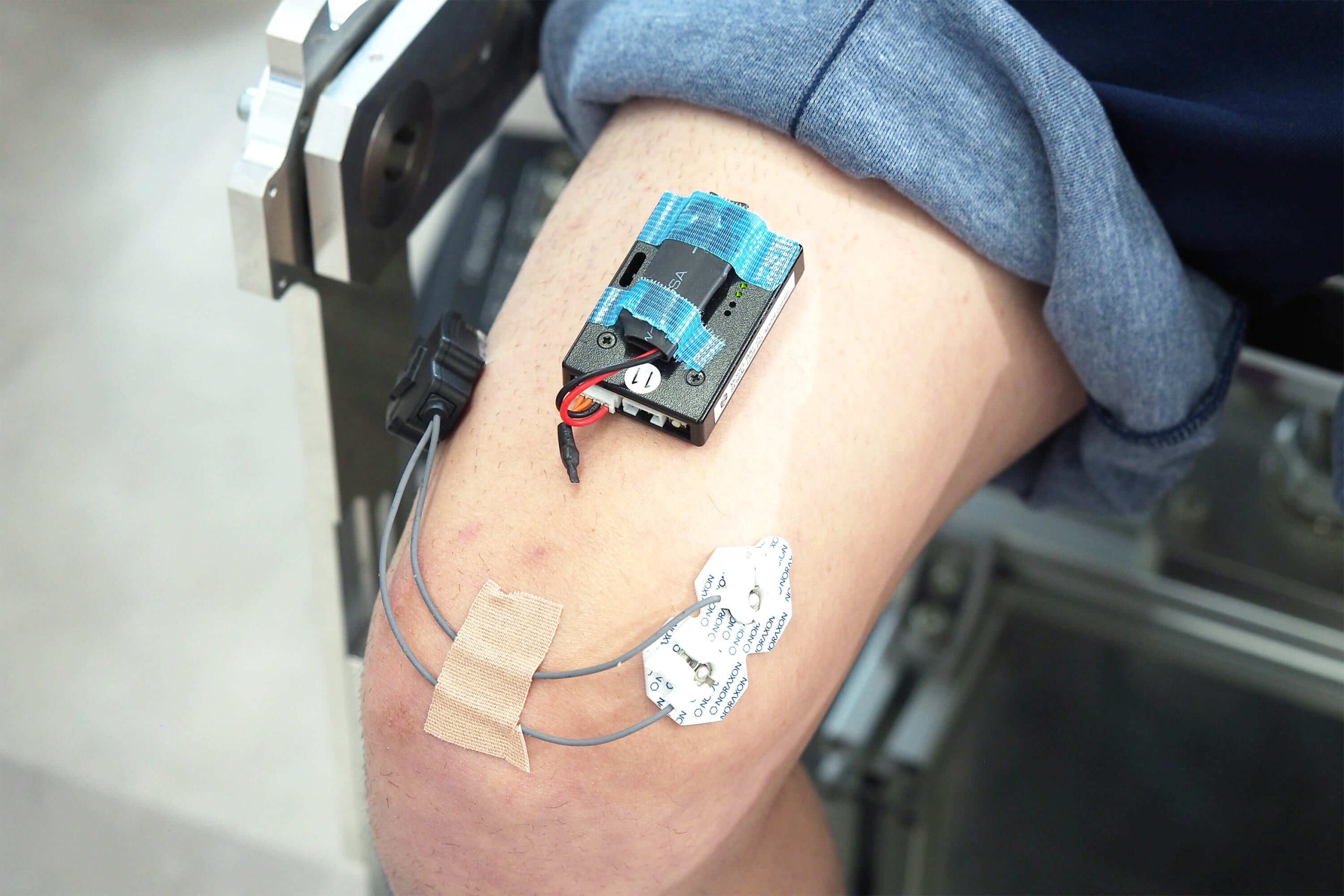
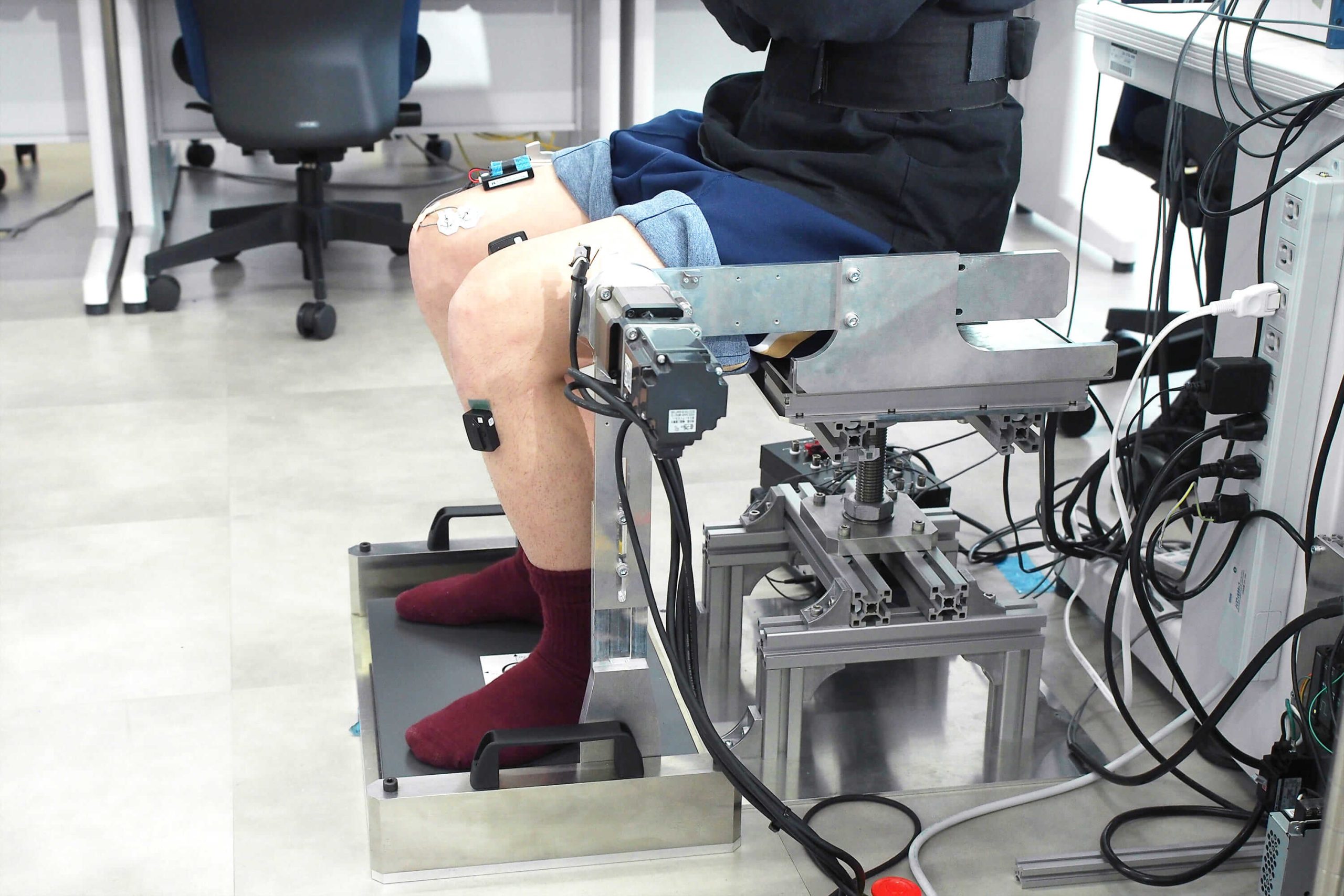
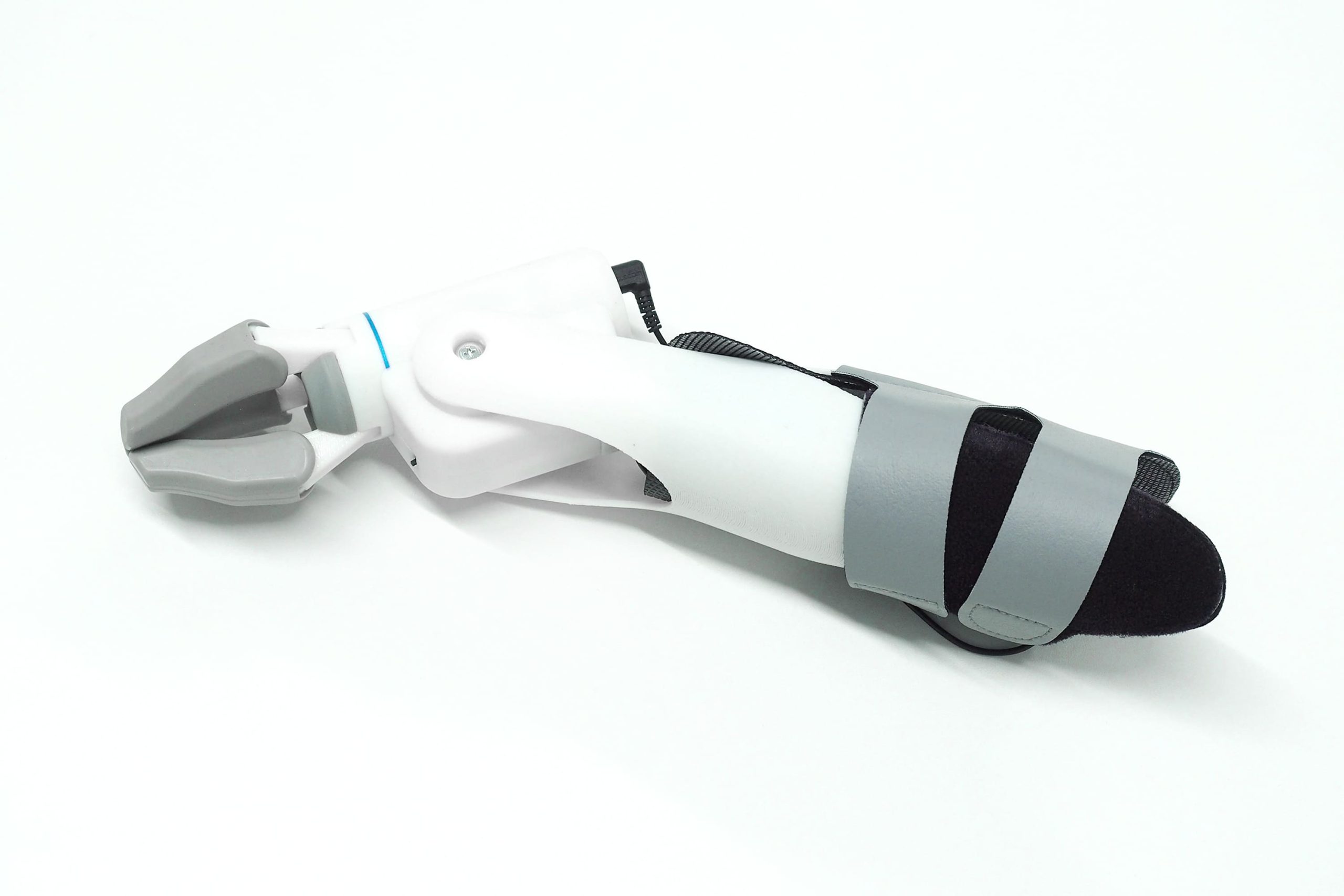
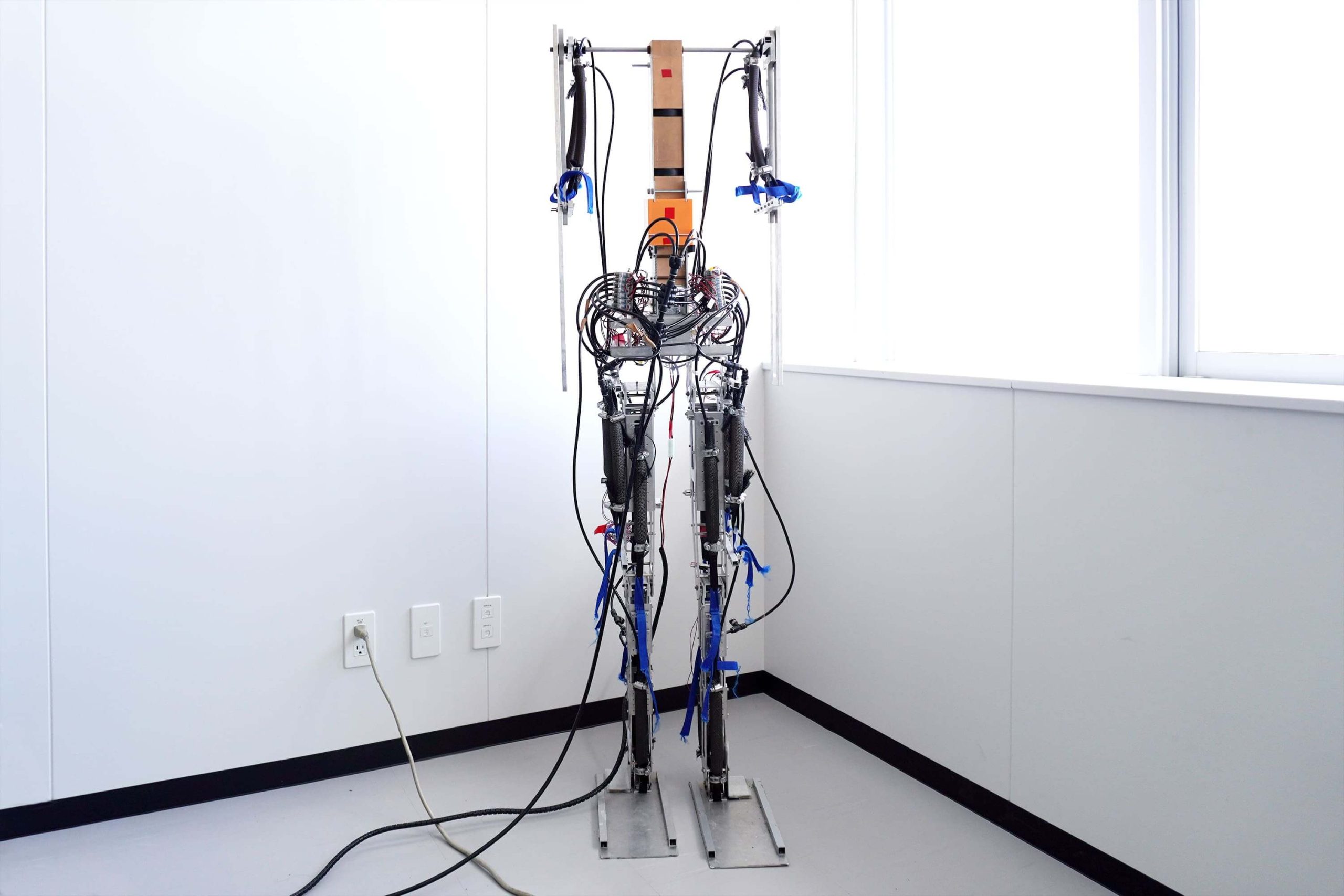
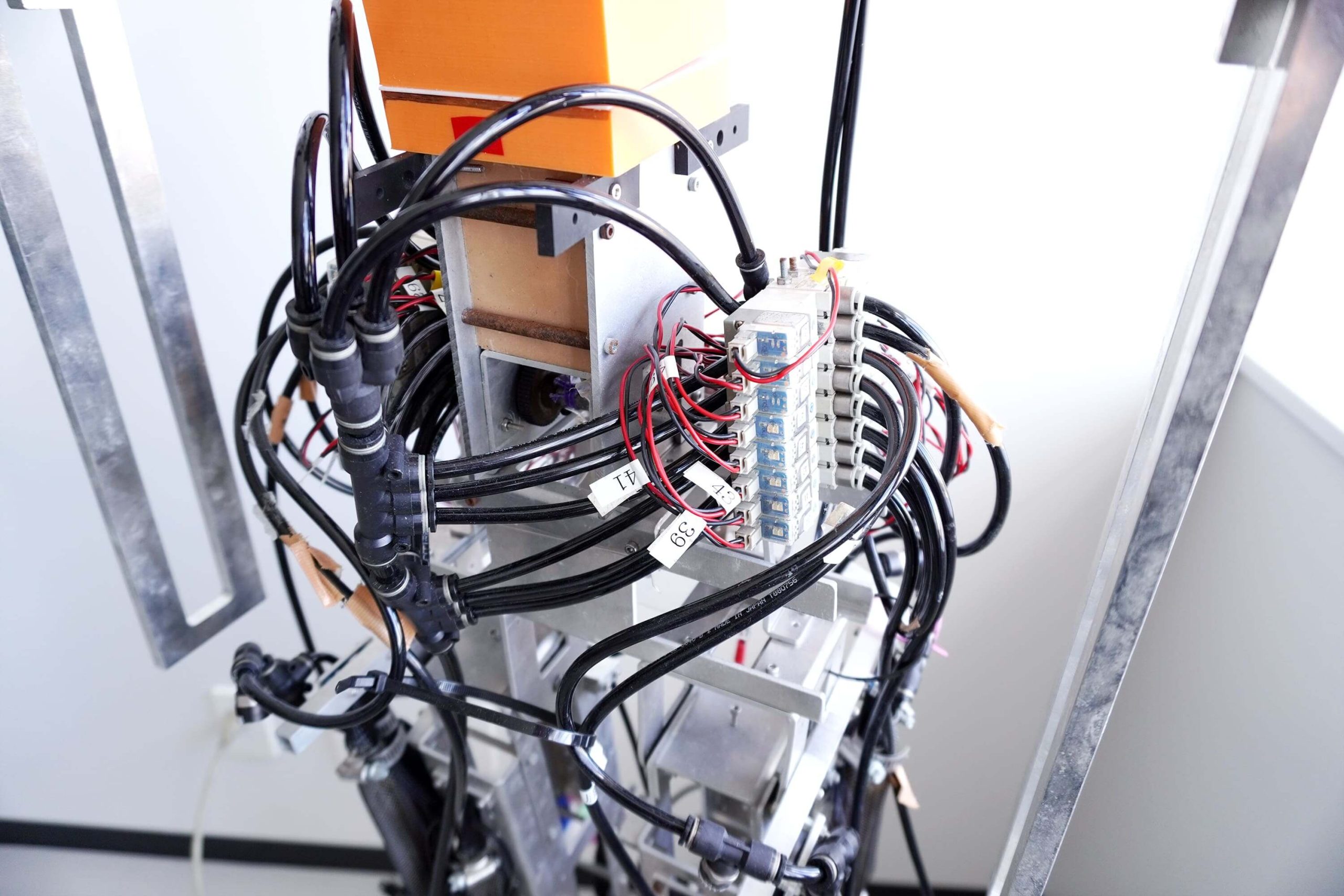
たとえば、ソフトアクチュエータを利用した足関節のリハビリ装置。3Dプリンタなどのデジタルファブリケーションを駆使した電動義手。さらには、段差の乗り越え可能な車椅子、高齢者用の新型歩行器、起立動作のリハビリ支援装置…。ロボティクスの分野では、生物のように柔軟な「身体」と、それを制御する「脳・神経」のような働きをもつロボットなどが誕生しています。また、ものづくりだけでなく、生体を測るセンシングの技術やそれを活かしたシステム開発、運動や食品摂取が健康にどのように影響するかといった研究なども日々進化しています。