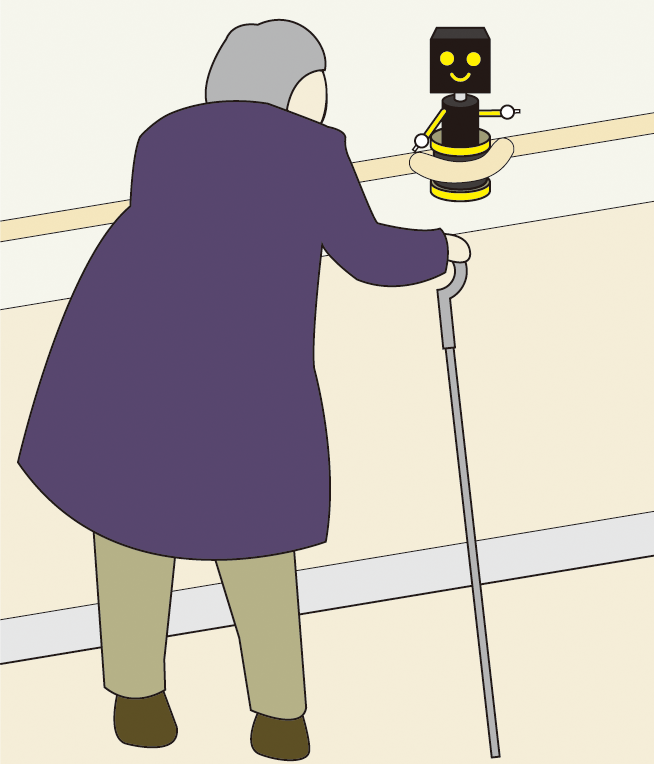
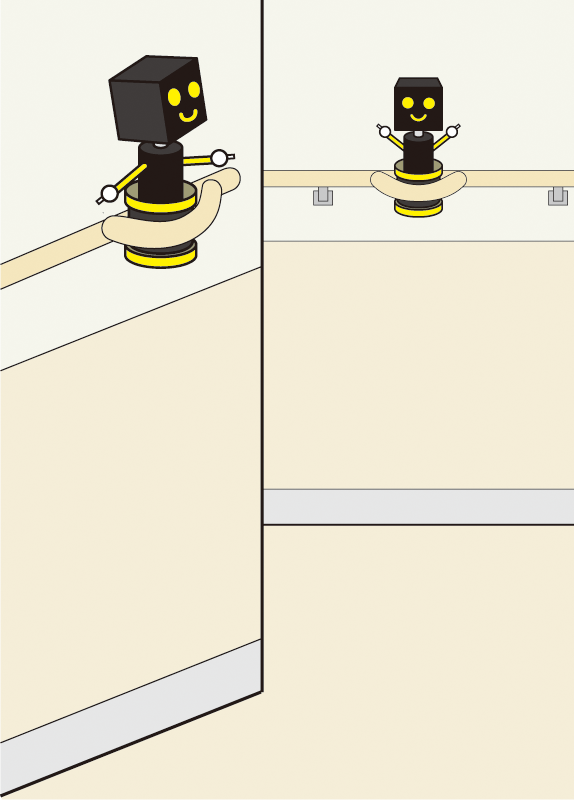
手すりの上を移動する道案内ロボット
ロボティクス&デザイン工学部
ロボット工学科
生活支援ロボットシステム研究室
廣井富
准教授
本コミュニケーションロボットの特徴は、手すりの上を移動することである。ケータイや地図が読めない方でも問題なく、音声とジェスチャで指示してくれる。さらに人はロボットの手を握って誘導される。この時、ロボットの腕が伸び縮み可能なシステムを構築した。これにより、人の歩行速度に応じた無理のない道案内が可能である。本研究室でアルゴリズムを開発した「測域センサを用いた人検出システム」を応用しており、複数人が存在する環境内においても対象者を見失うことがなく、動作可能である。また、ロボットと案内される人の対話が破綻している場合等にオペレータが介入可能である。その介入頻度を簡易に制御可能であり、オペレータの負荷を軽減することが可能である。
論文
「A Pedestrian Avoidance Method Considering Personal Space for a Guide Robot 」(2019)YutakaHiroi『Robotics』8p.21 pages.
「Realization of a Robot System That Plays “Darumasan-Ga-Koronda ” Game with Humans」(2019)YutakaHiroi『Robotics』8p.15 pages.
「Cluster-based approach to discriminate the user’s state whether a user is embarrassed or thinking to an answer to a prompt」(2017)YuyaChiba『Journal on Multimodal User Interfaces』11p.185-196.
特許
特願2017-37648特開2018-142280「対話支援装置及び対話装置」