肥満のメカニズム解明とその応用
21世紀に入り、先進国のみならず世界中においても飢餓から飽食の時代へとなりつつあり、人類は食欲を欲望のまま満たすこともできるようになったきました。このような時代において、国民の健康的な生活を阻む代表的な病態がメタボリックシンドロームであることは明白です。我々の研究室では、培養細胞やモデル動物を用いて、肥満のメカニズムを明らかにするとともに、それを解消する機能性食品の探索と開発を目指しています。
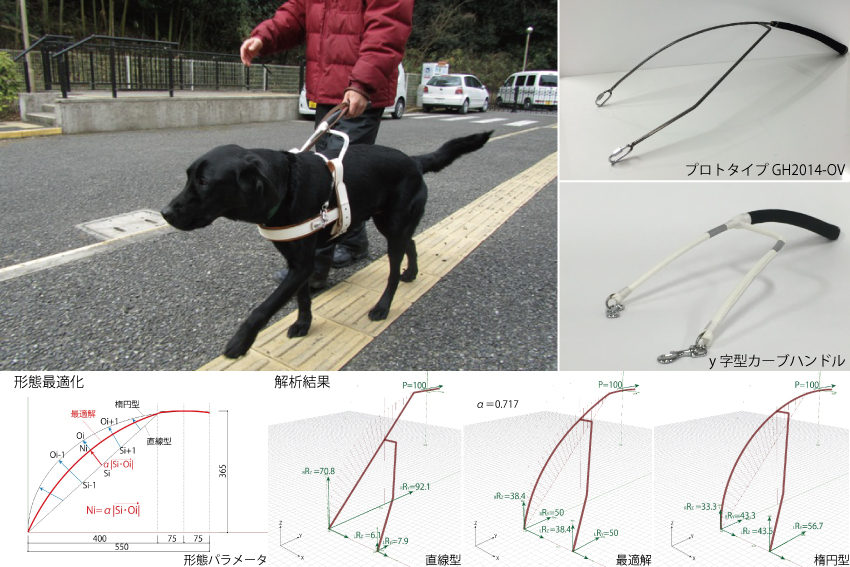
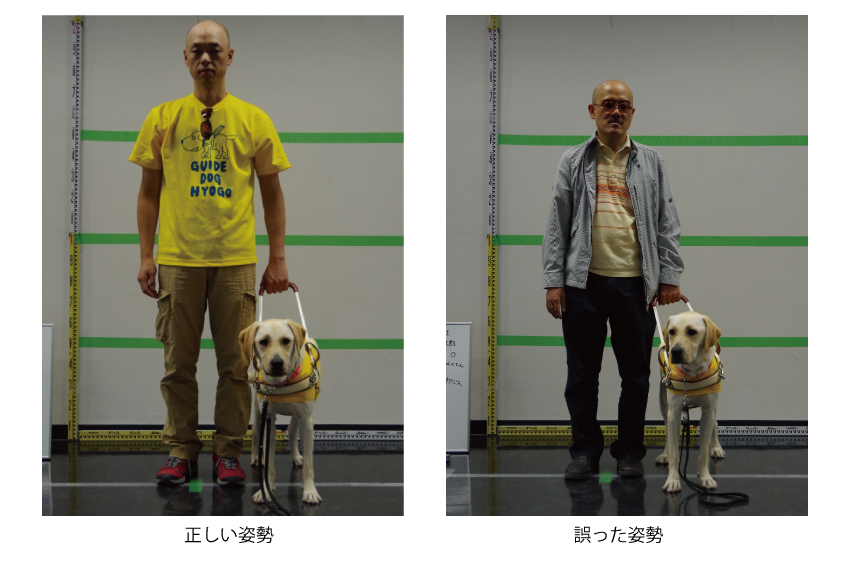
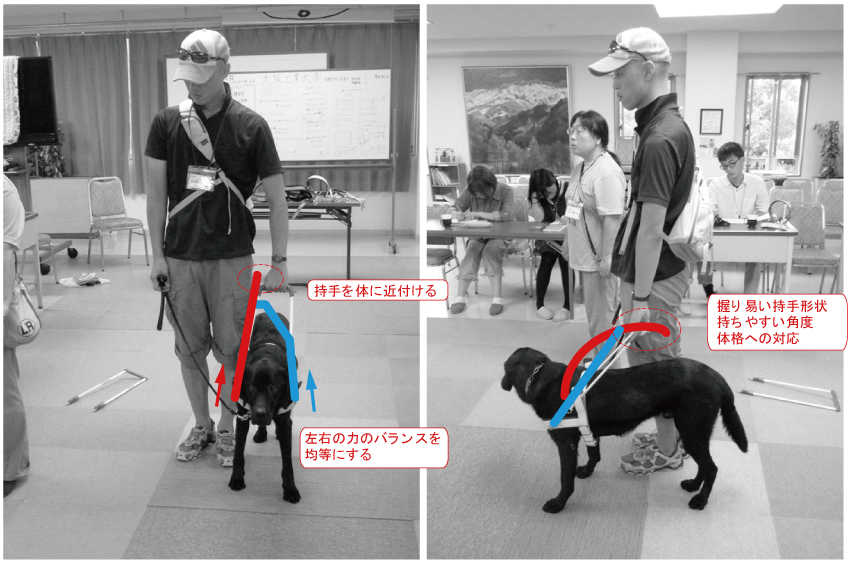
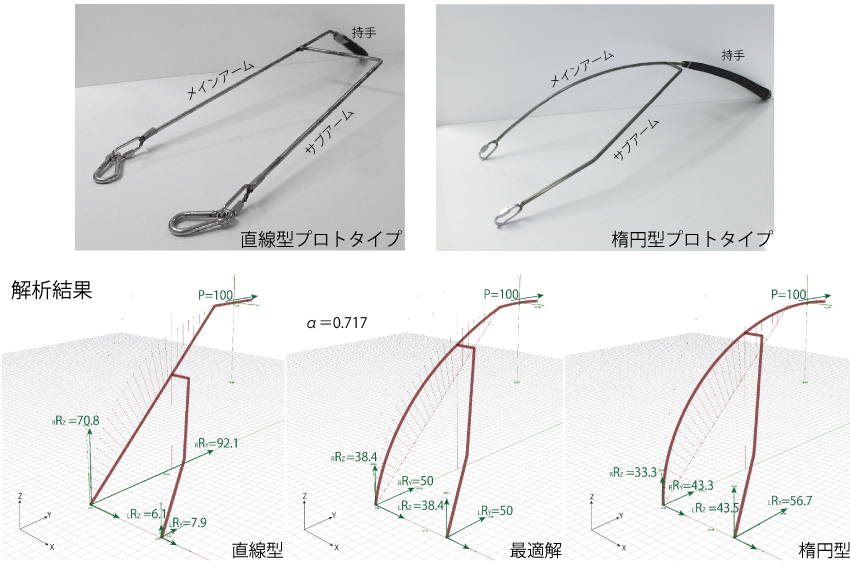
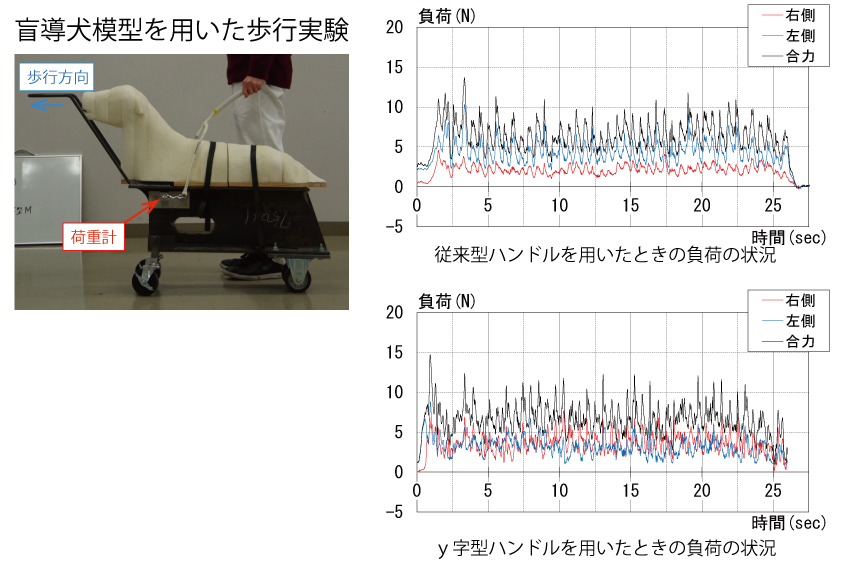
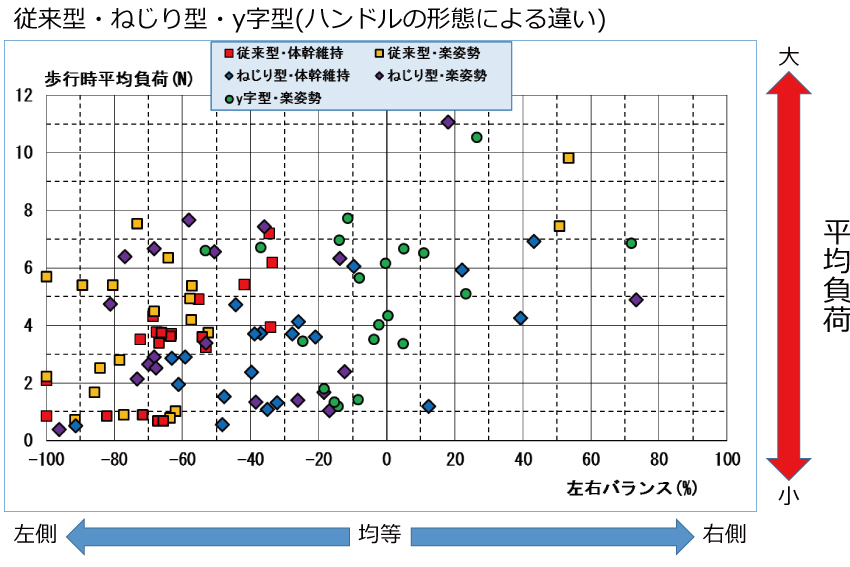
建築構造設計において利用される構造解析方法に基づくデザインをプロダクトデザインに応用することについて研究を行っている。 本研究は,プロダクトデザイン研究室(赤井准教授),兵庫盲導犬協会と共同で盲導犬とユーザーの安全で快適な歩行を実現するために,歩行時の盲導犬とユーザーの負荷の定量化を行い,その負荷を軽減するハーネス,盲導犬からの情報をより的確にユーザーに伝達するハーネスの開発を目的にしている。

論文
「形態最適化により設計された盲導犬用ハンドルの提案」(2021)『日本デザイン学会 デザイン学研究』68(1)p.29-38.
「y字型カーブハンドルを用いた歩行実験」(2020)『日本デザイン学会第67回春季研究発表大会梗概集』p.338-339.
「設計領域を単曲面としたハンドルの形態探査」(2019)『日本デザイン学会第66回春季研究発表大会梗概集』p.58-59.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.