教師役のロボット・バーチャルエージェントのデザイン
オンライン授業や教室で、人間の教師に代わって授業を行うロボット・バーチャルエージェントのデザインについて、探索的に実験研究を行う。特に、教師役のロボット・バーチャルエージェントの「外見」「発話」と、「教える科目」との相互関係に着目し、教える科目に応じてロボット・バーチャルエージェントをデザインするためのメソッドを提案することを目指す。
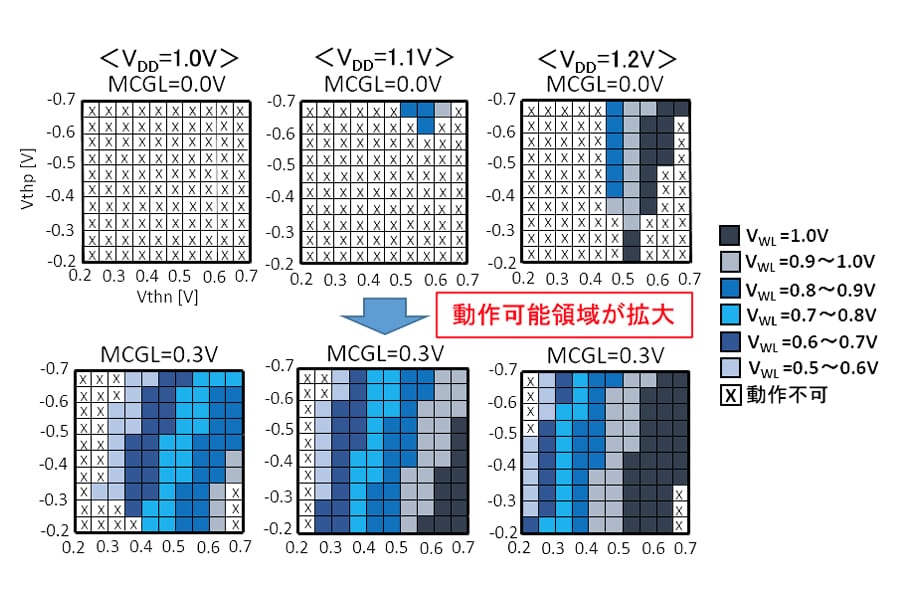
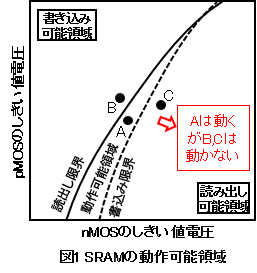
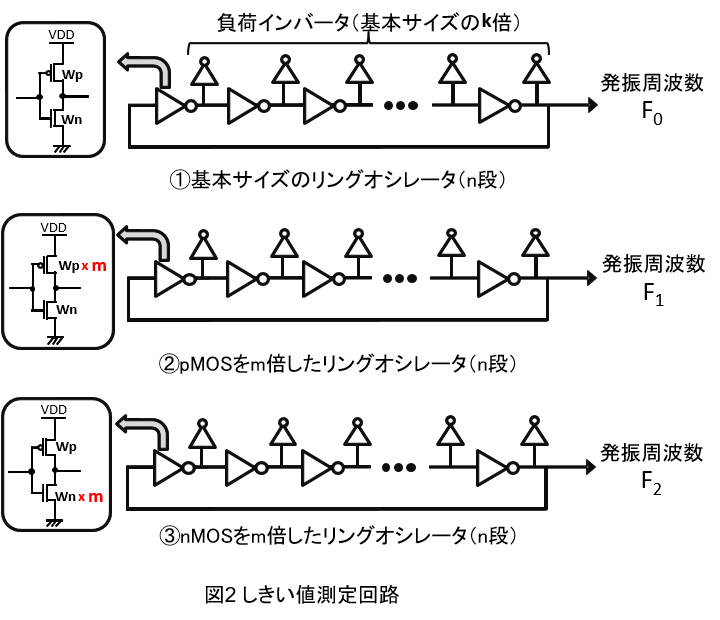
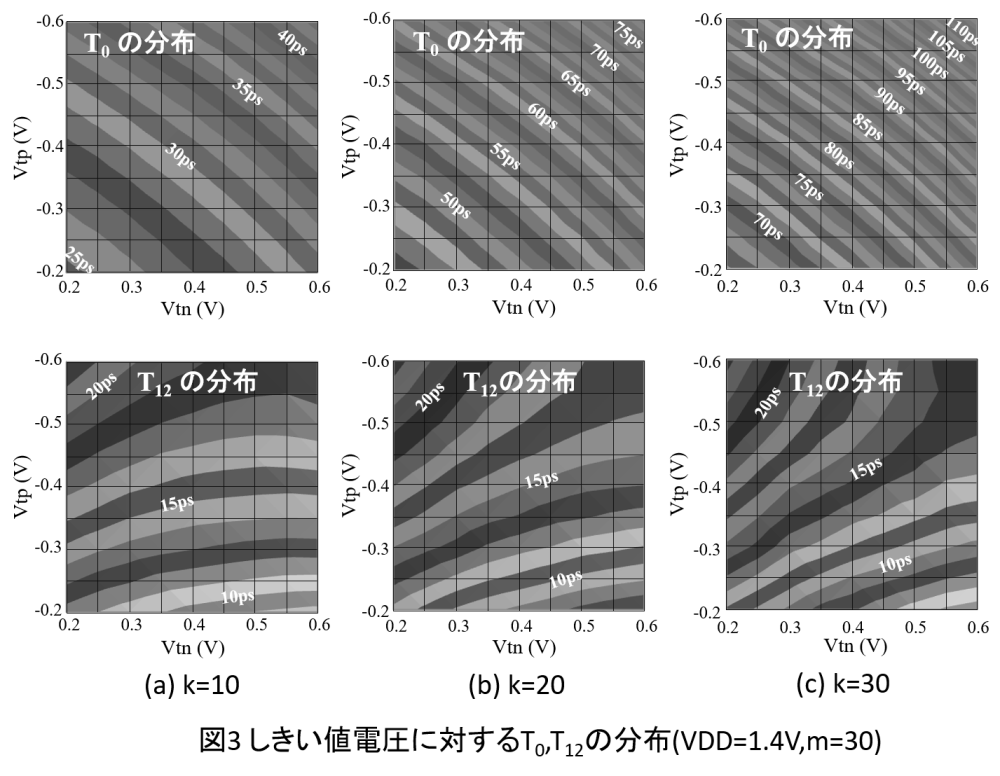
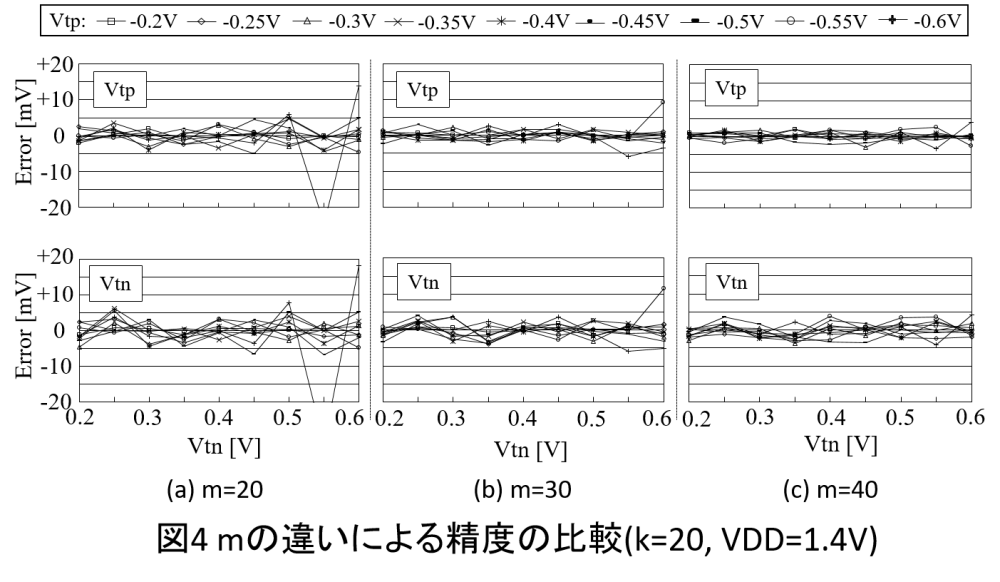
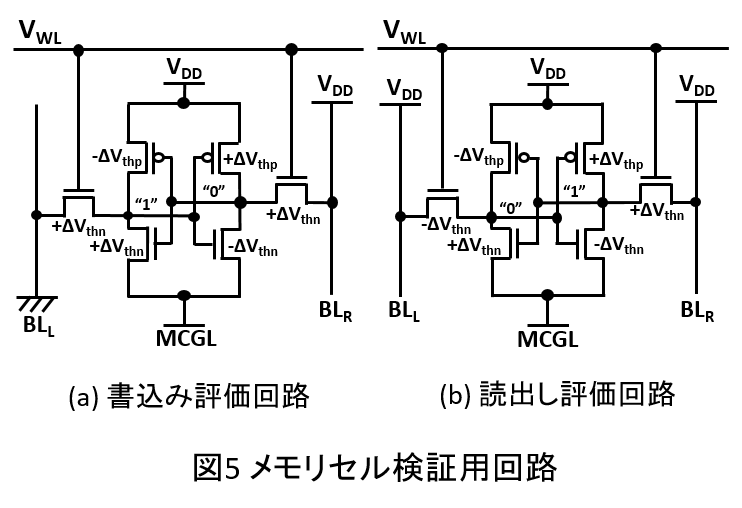
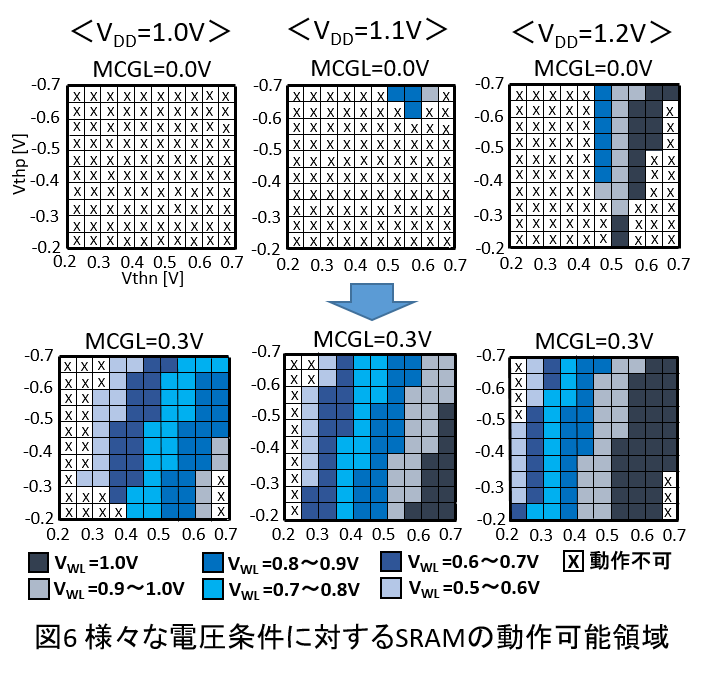
トランジスタのしきい値電圧のばらつきによってSRAMが動作不良となる問題に対して、これを救済し歩留まりを向上させる手法を開発しました。まず、オンチップでしきい値電圧を測定する方法を提案し、5mVの精度で検知可能であることを確認しました。さらに、様々なしきい値電圧において、メモリセル(記憶回路の最小単位)に与える電圧を変化させて動作可否を調べることにより、SRAMに与える最適電圧を明らかにしました。なお、本研究はJSPS科研費 (JP23560423)の助成を受けたものです。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.