インタラクタを用いた線形制御系の解析・設計
工学部
電気電子システム工学科
システム制御研究室
加瀬渡
教授
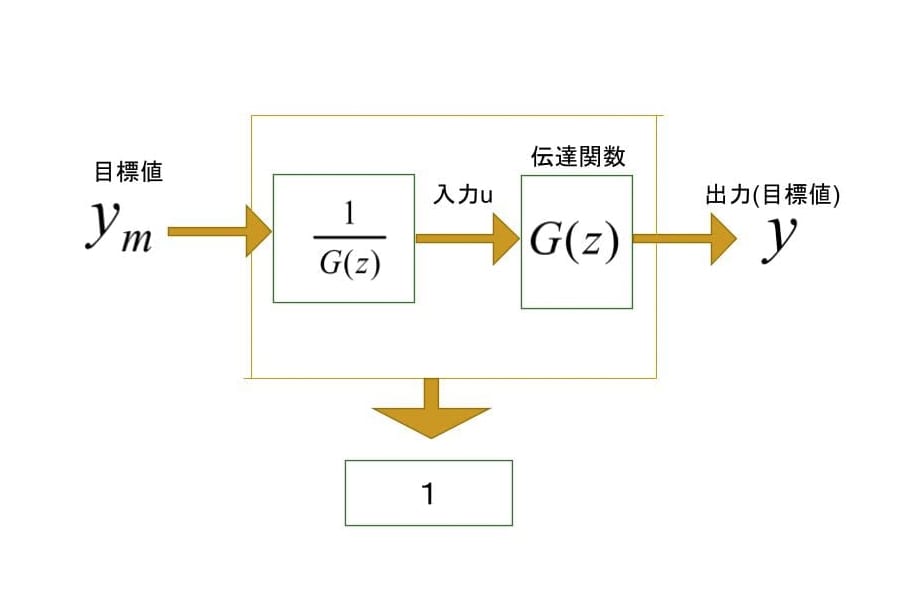
追従制御系を構成する際、制御対象の伝達関数に対して、その逆数を前置補償器として用いる方法が考えられる。この補償器は微分器を含み、その部分をインタラクタという。一入出力系では、インタラクタは伝達関数の相対次数を有する多項式とすればよい。しかし、多入出力系においてはインタラクタは多項式を要素とする行列になり、伝達関数の相対次数以外に、そのパラメータにも依存するため導出も難しい。本研究では、出力数が入力数よりも多い系に対してインタラクタに関連する様々な問題、例えば特異な重みを有するLQ問題の解の陽表現、最大非可観測化問題、状態フィードバックにより逆インタラクタ化、不変零点の計算法などを考える。特にLQ問題に関しては、特殊な重みを用いることによりRiccati方程式の解が容易に得られるのであるが、その解法を(インタラクタと直接関係はないが)状態フィードバックによる有限整定制御に応用できる。
論文
「状態フィードバックによる擬似インナー化制御」(2016)加瀬渡『電気学会論文誌C編』136(12)p.1829-1835.
「A simple derivation of the interactor matrix and its applications 」(2009)KASEWataru『International Journal of Systems Science』40(11)p.1197 - 1205.
「Suboptimal exact model matching for multivariable systems with measurement noise」(2000)KASEWataru『IEEE Transactions on Automatic Control』45(6)p.1170-1175.