非把持双腕ロボットによる摩擦力補償無しでの抱きかかえ制御
本研究では,力学的な本質を失わず,3次元運動を2次元運動に簡略化し,要介護者を二つの関節を持った3リンクの物体とみなす.そして,非把持双腕ロボットアームとリンクの間の静止摩擦を利用し,3リンク物体がロボットアームから滑り落ちないための安定領域を求め,その中に摩擦力が最も小さくなる姿勢を求める.得られた最適な角度を用いて,ロボットの抱きかかえ制御を行い,3リンク物体の安定支持が実現できることを示す.
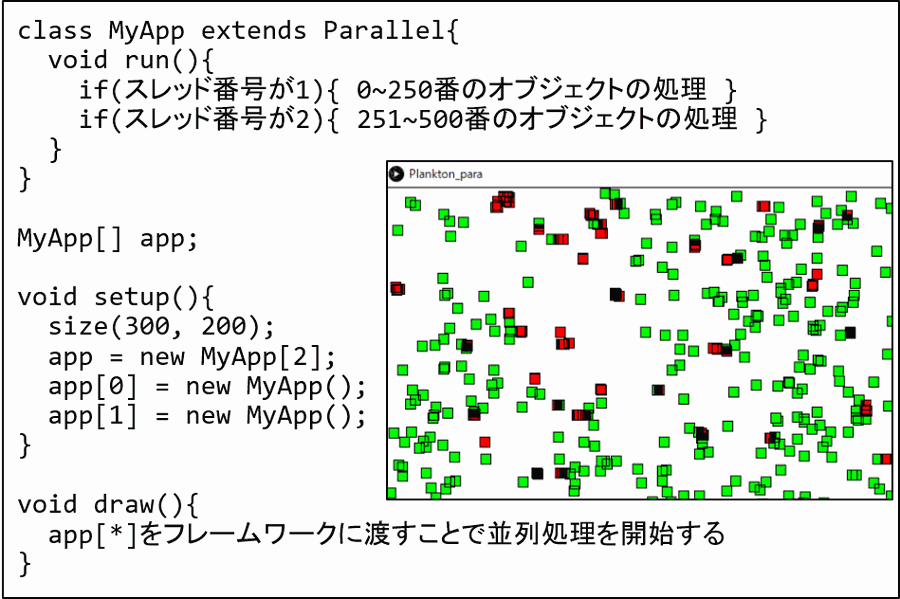
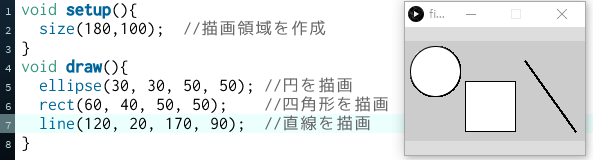
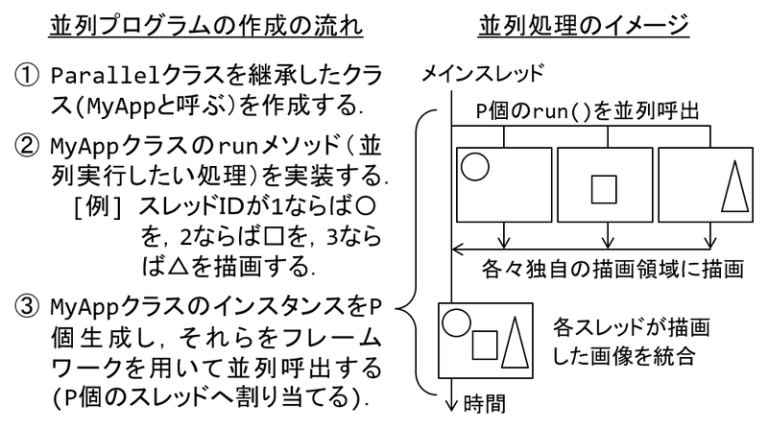
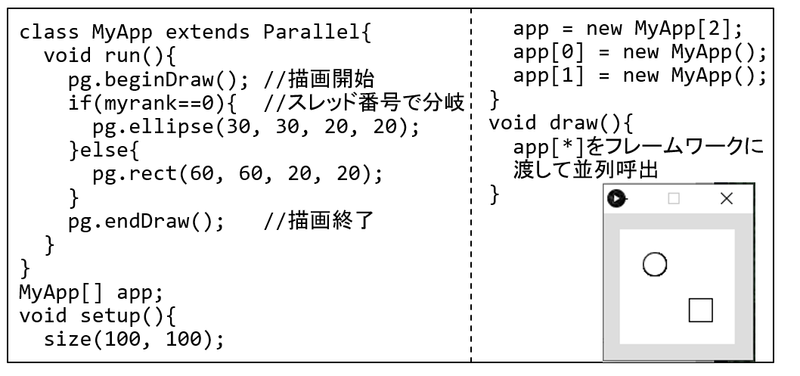
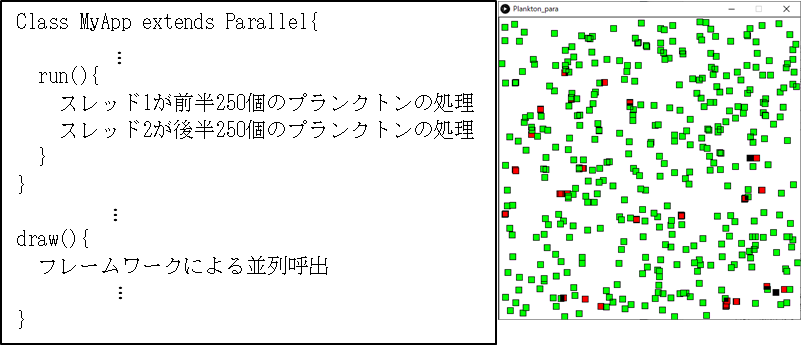
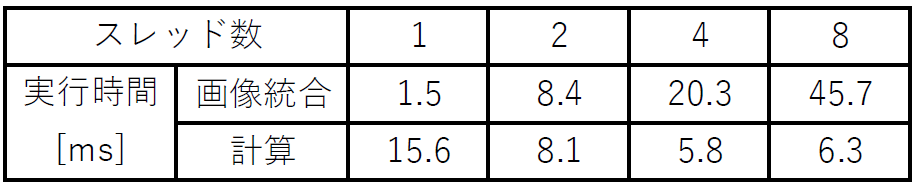
マルチコアCPUの性能を最大限に活用してプログラムを高速実行するためには並列プログラムを作成する必要がある。しかし、一般に並列プログラミングの学習は初学者にとっては容易ではない。その理由として、数値計算問題を題材とすること、および大規模な計算でない限り並列化の効果を実感できないことから、初学者の興味を維持しにくいことが考えらえる。本研究では並列化の効果を体感しやすく、かつ、平易な教材を扱える並列プログラミングの学習環境としてProcessing言語を用いた図形アニメーションプログラムのための並列化フレームワークを提案する。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.