筋隆起センシングにより操作する対向3指の電動義手
筋隆起センシングにより操作する対向3指の電動義手です.様々な日用品を操作できる対向3指ハンド,容易に着脱可能なサポータソケット,筋隆起センサで検出した筋隆起による操作システムが特長です.ハンド,ソケット,筋隆起センサ,それぞれが要素技術として利用可能です.
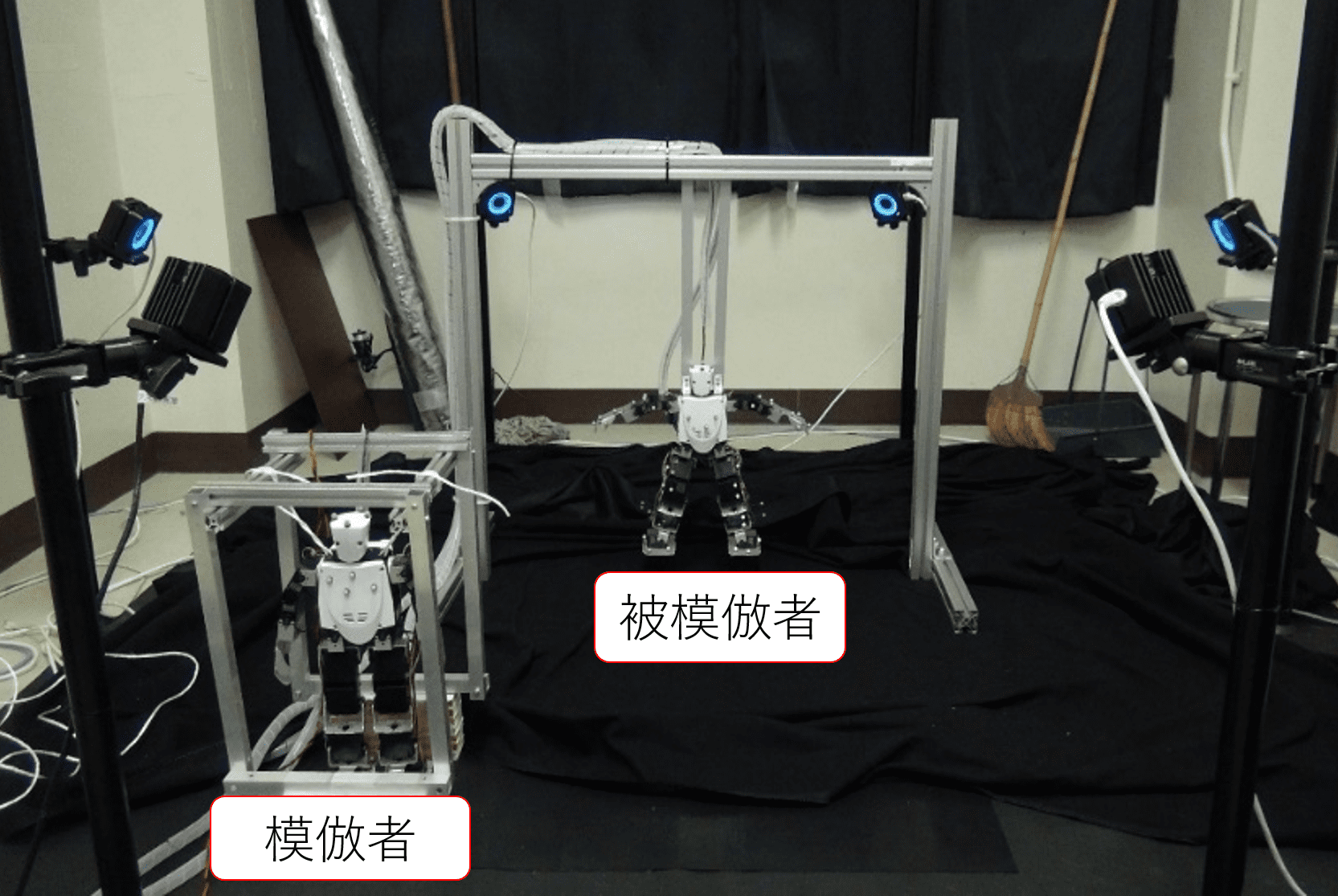
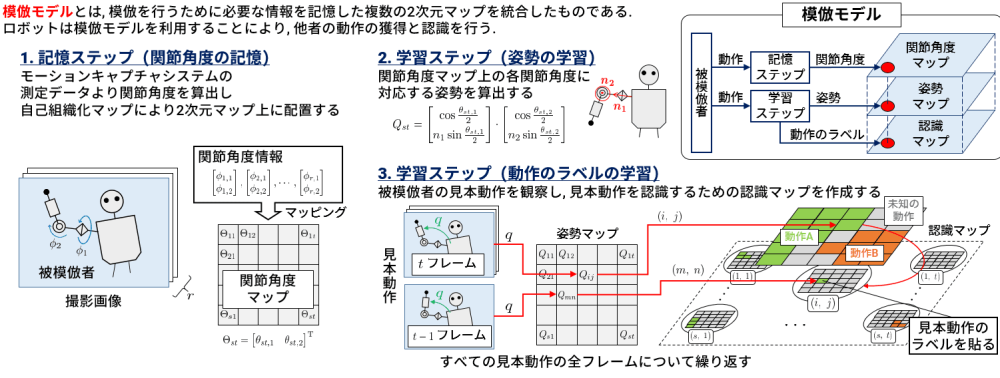
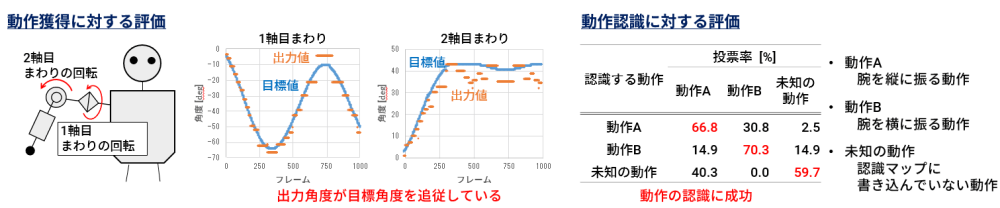
日常生活の中で活躍するロボットには, 周囲の環境に合わせ臨機応変に動作することが求められる. ロボットに臨機応変な動作をさせるには, ロボットに他者の動作を模倣をさせることが有効である. ロボットは模倣により, 事前にプログラミングされていない新たな動作を獲得する. 本研究では, ロボットが人間のように新たな動作を獲得するシステムを構築することを目的とし, 自己組織化マップ (SOM: Self-Organizing Map) とモーションキャプチャシステムを用いて, 他者の動作を模倣させることにより, ヒューマノイドロボットの高度な動作制御の実現を目指す.

論文
「自己組織化マップを用いた摸倣による小型ヒューマノイドロボットの動作制御」(2020)『2019年度計測自動制御学会関西支部・システム制御情報学会シンポジウム予稿集』
「人間の動作を模倣し新たな動作を習得する人型ロボットの実現」(2021)『第65回システム制御情報学会研究発表講演会』
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.