非接触型の空間温度分布計測手法
光の屈折を利用した空間の温度分布の計測手法を開発しました.航空機・自動車・流体機械・家電の周辺に生じる熱の移流などの流体現象の把握に役立ちます.現在,複雑な流れ場にも適用できる手法の開発にも取り組んでいます.
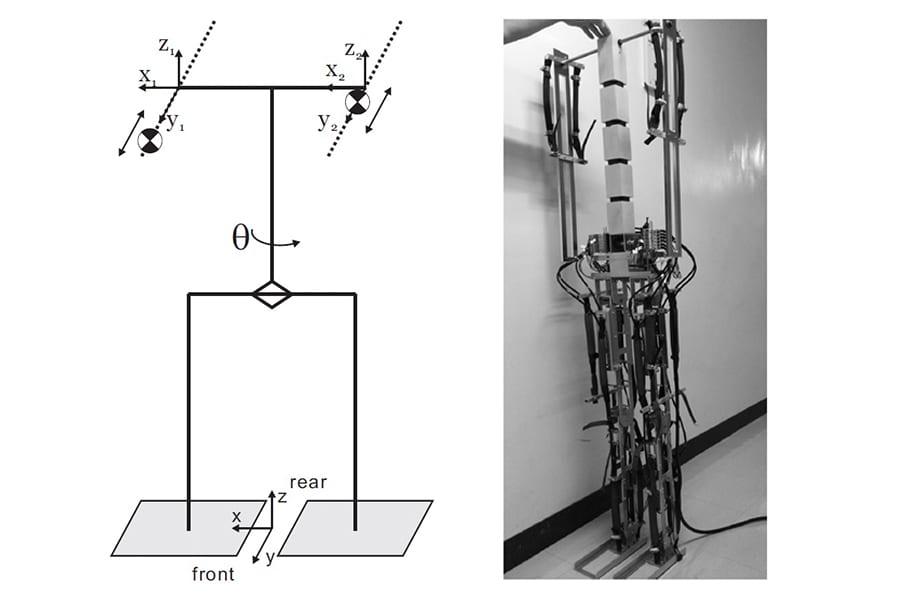
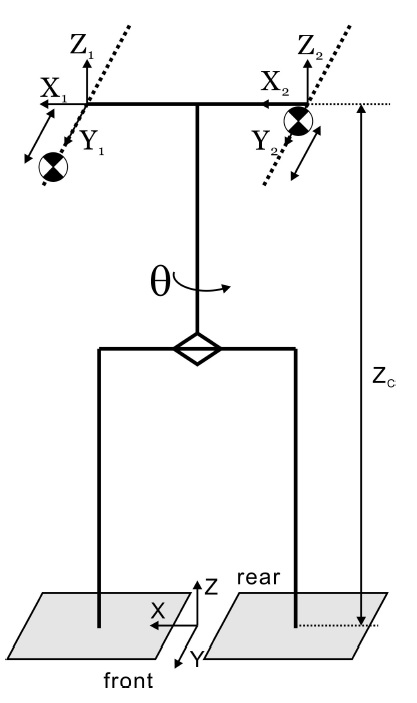
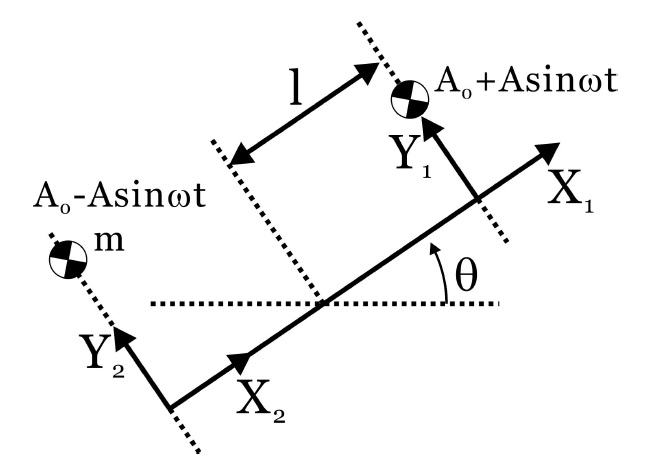
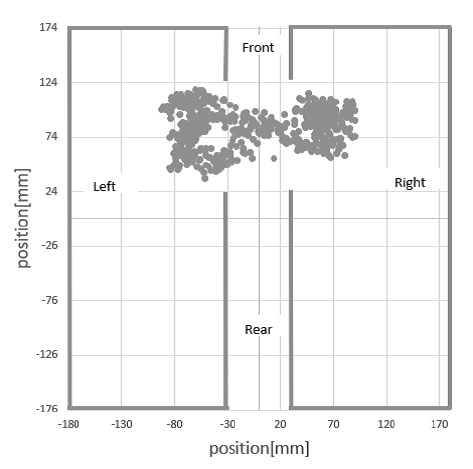
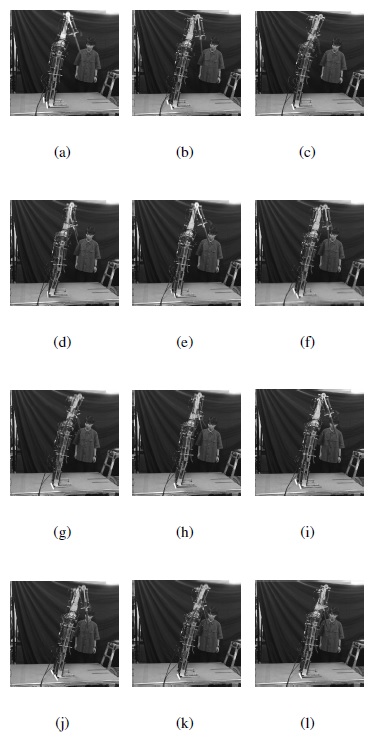
ヒトが歩行時に腕振りや体幹捻りを無意識に行う理由は,当たり前のように見えてまだ解明していない問題の一つです.この問題を解決することでヒト,特に高齢者の運動能力の向上だけでなく,ロボットの新しい運動生成方法の提案など,様々な発展が期待できます.本研究ではヒトの上半身を簡単なモデルで表し,腕の前後方向の振りと,それに応じて回転する体幹の捻りが足裏にかかる力にどのような影響を与えるか調べています.調査の結果,腕は前後対象で無く非対称に振ると良いこと,体幹は柔軟性をもって捻ると良いこと,柔らかさを変えることで二足歩行が促進できることが分かってきました.また二脚歩行ロボットを試作し,歩行が可能であることも分かりました.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.