数値流体力学(CFD)を用いた最適化設計
数値流体力学(CFD)を用いて最適化設計を行います。設計パラメータの最適な組み合わせを迅速に見つけ出す手法を提案します。手法の検証には3Dプリンタを用いて対象を製作し、性能試験、各種物理量の計測や流れの可視化を行い、現象や勘所を平易に解説します。ライセンスフリーのCFDソフトウェア(OpenFOAM)を用いたコンサルティングも行います。

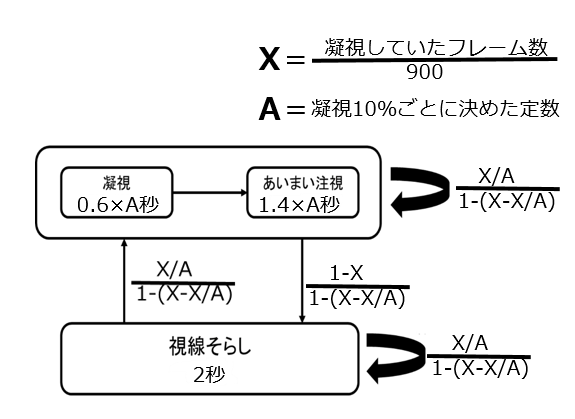
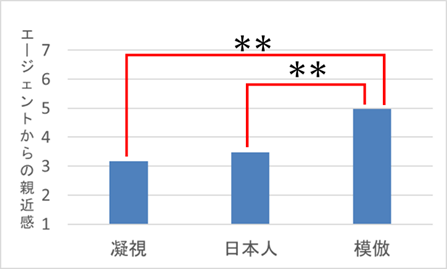
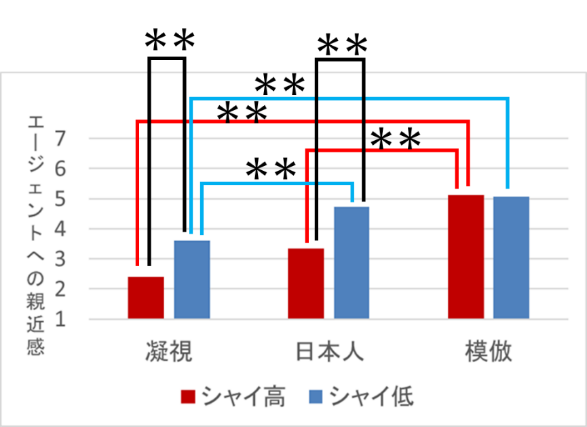
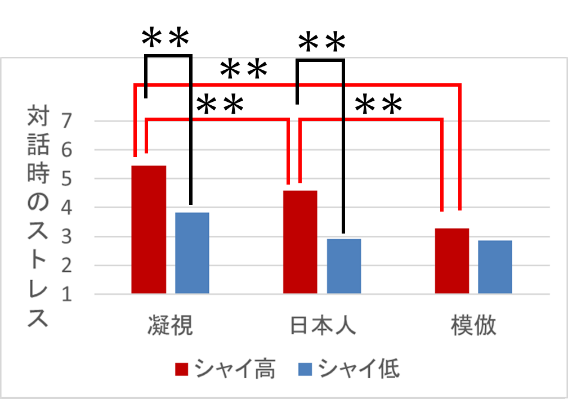
シャイな人間は対話相手の視線に敏感であり,注視されることを嫌うということが示されている.本研究は実験参加者の視線行動に適応するエージェントの視線行動の開発と評価を目的とする.具体的には,対話中のユーザの視線行動をアイトラッカーで取得し,過去15秒間にユーザがエージェントの目を注視していた割合を基に対話エージェントがユーザの目を注視する割合を適応させ,ユーザと類似した凝視量を保ちながら視線行動をとる対話エージェントを開発した.評価実験では,シャイなユーザグループに対話のストレスの軽減効果および対話エージェントへの親近感の向上効果が見られた.


論文
「Development and Evaluation of Agent's Adaptive Gaze Behaviors」(2020)『Proceedings of Human-agent Interaction 2020 (HAI'20)』
「ユーザの視線行動に適応したエージェントの視線行動の開発と評価」(2020)『信学技報HCS2020-23』120(136)p.11-16.
「ユーザの視線行動に適応したエージェントの視線行動の開発と評価」(2020)『HAIシンポジウム2020』
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.