ソフトウェアエージェントによるによる社会シミュレーション
複雑な社会の動きの完璧な予測や、瞬間的な社会の状態の正確な把握は、AIを用いても極めて困難である。一方で、生物や人間など多くのシステムは、動的かつ予測不能な局面において極めて柔軟に対処している。 本研究では、様々な生物や物体を模擬したソフトウェア(エージェント)を作成し、エージェントの自律行動や相互作用によって、社会に実在する問題や、現実では実現しにくい社会環境での生物の振る舞いなどを検証する。
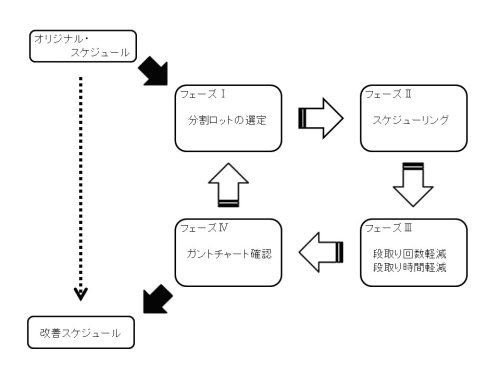
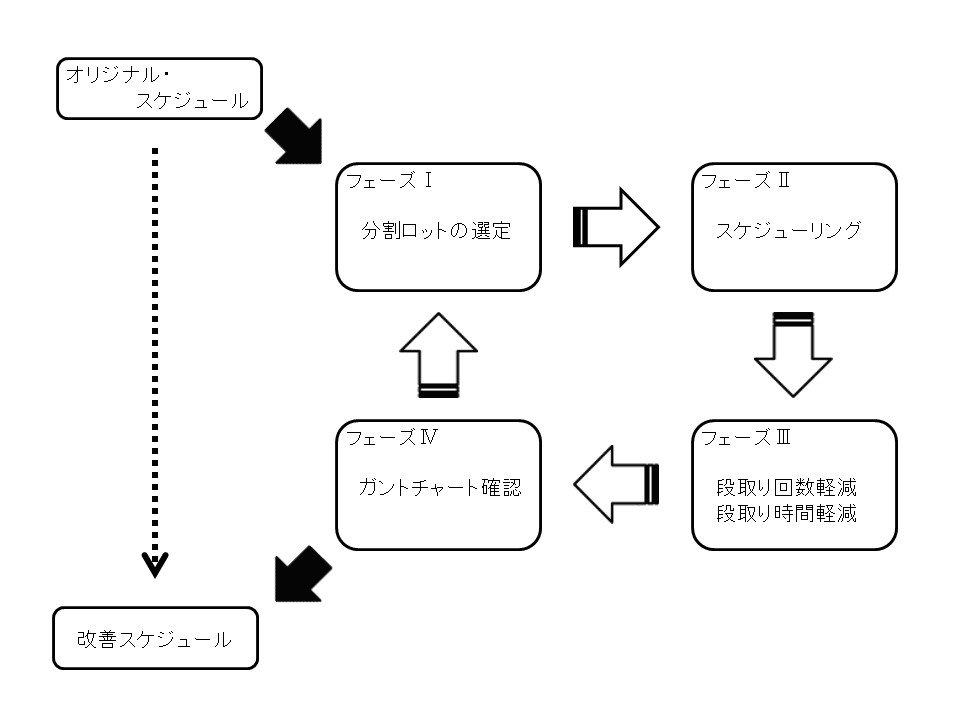
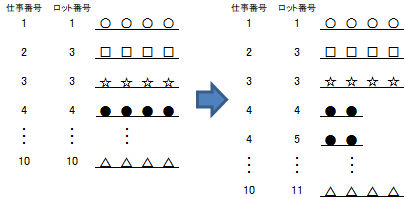
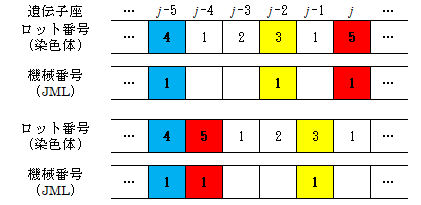
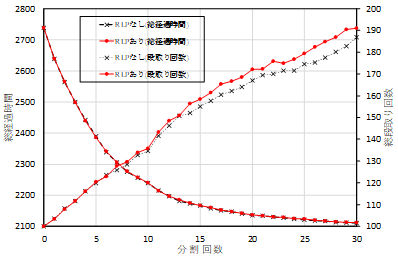
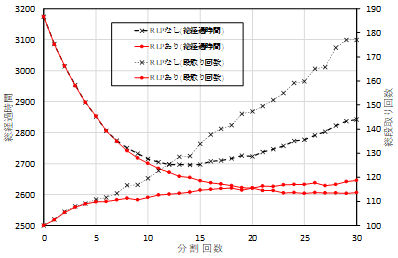
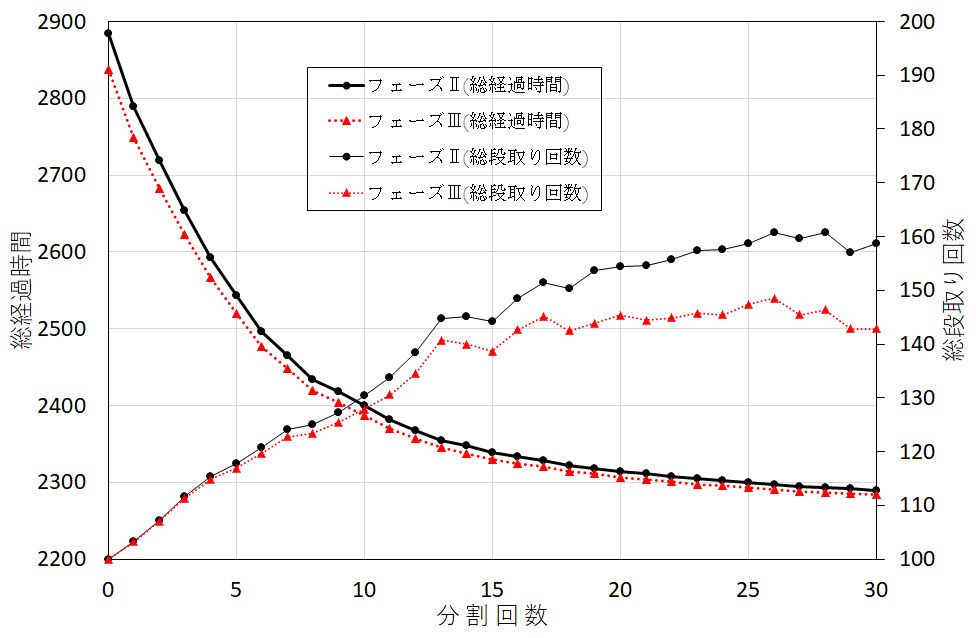
生産スケジュール改善サイクルは、ロット分割を段階的に進めることにより、段取り回数の増加を抑えつつ良好なスケジュールを得るための仕組みである。ロット分割は、生産スケジュール改善のための有効な手法の一つであるが、分割によってロット数が増えることになる。その結果として、総段取り時間が増加するだけではなく生産統制を複雑にしてしまう。このサイクルは四つのフェーズから構成され、受け入れ可能な総経過時間となる生産スケジュールが得られるまで繰り返す。

論文
「段取り時間を考慮した生産スケジュール改善サイクルの開発と数値実験」(2018)『日本経営システム学会誌』34(3)p.283-294.
「GAによる局所的な遅れのないスケジュール生成に基づくジョブ・ショップ・スケジューリング」(2015)『日本経営システム学会誌』31(1)p.1-11.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム