丘のある住まい
多くの世帯の生活の舞台となる「集合住宅」は自ずと大規模な開発になることが多く、まとまった豊かな環境を形成することが可能である。住まいとなる住棟の設計と合わせて、その広がりを生かした豊かなランドスケープデザインを展開することで、戸建て住宅地では成しえない環境を形成できる。
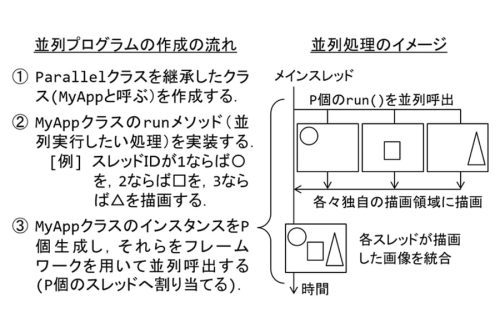
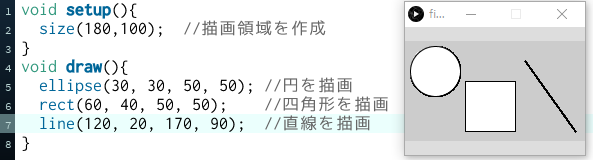
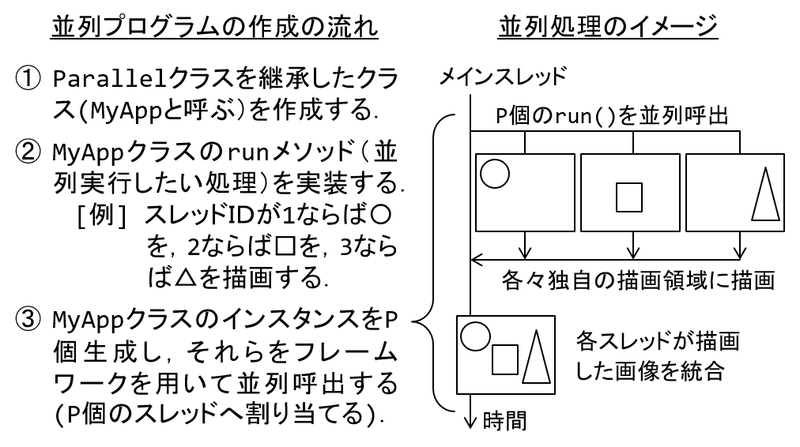
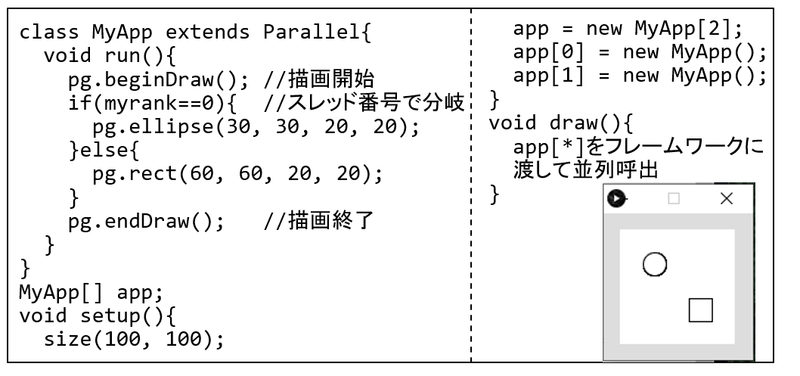
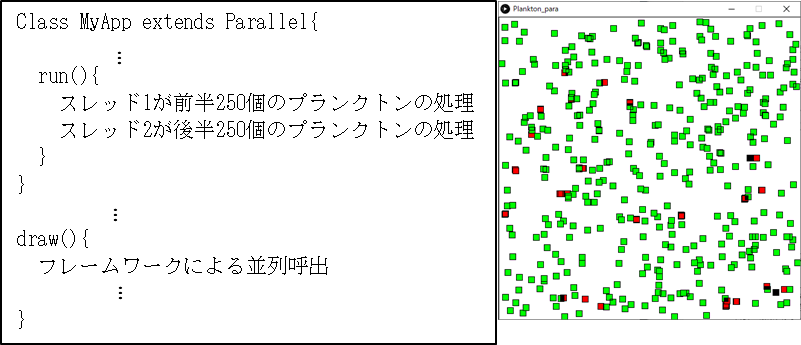
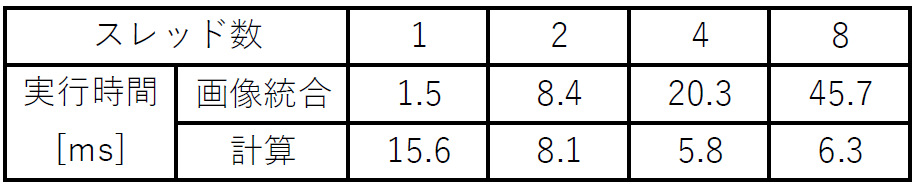
マルチコアCPUを用いてプログラムの実行性能を上げるためには並列プログラムを作成する必要がある。一般に、並列プログラミングの学習は初学者にとっては容易ではない。その理由として、数値計算問題を題材とすること、および大規模な計算でない限り並列化の効果を実感できないことから、初学者の興味を維持しにくいことが考えらえる。本研究では、並列化の効果を体感しやすく、かつ、平易な教材を扱える並列プログラミングの学習環境として、Processing言語を用いた図形アニメーションプログラムのための並列化フレームワークを提案する。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム