
マルチエージェントを用いた避難行動シミュレーション分析
近年,豪雨災害や地震災害が連続し,巨大地震の可能性が高まっていますが,対象地域から来街者全員が円滑に避難を完了できるかについては,個人ではなく,群集としての避難行動を把握する必要があります。本研究室では,マルチエージェント・システムを用いてシミュレーションを行い,複数の避難誘導案や施設整備案を比較・評価し,対象地域の避難完了時間や避難者で混雑する場所を把握することで,防災・減災メニューを検討できるようなパッケージの構築をしています。
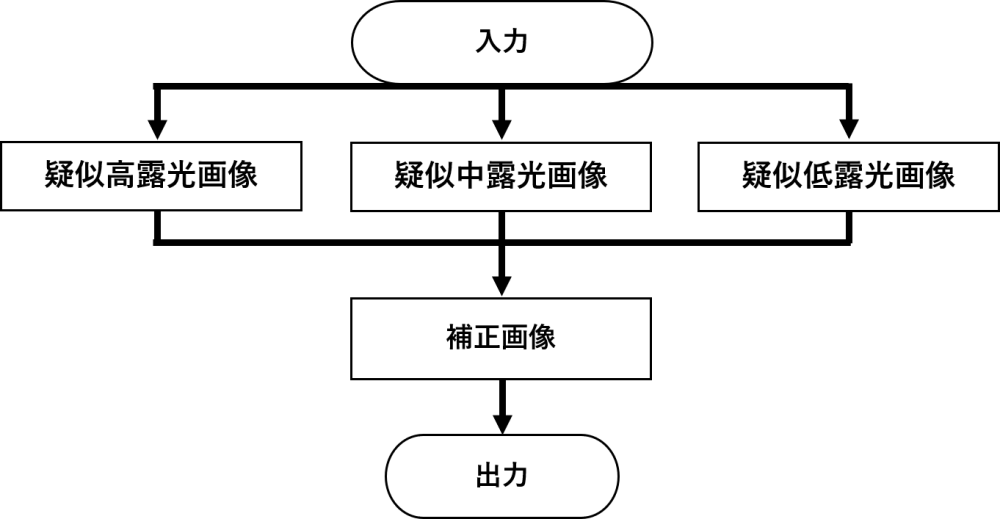
HDRは露光の異なる複数枚の画像を用いることで視認性を回復する手法であり,広く利用されている.しかし,移動する被写体において不向きであるとともに,過去に撮影された画像に使用することができない.そこで本研究では,一枚の画像から疑似的に多重露光画像を生成 し,それらを合成することで視認性の回復を行う手法を提案する.本手法は,自然界の色情報を完全に損失していない画像を対象とし,エッジ情報を用いて明度を自動調整することで,疑似多重露光画像を生成する.











研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム