古民家リノベーションによる地域再編に関する提案
古民家が並ぶ景観や古民家そのものが地域の観光資源となり、さらに古民家はカフェや図書館、ゲストハウスとして活用でき、貴重な地域資源と捉えられるようになってきた。今回の提案は、観光業、農業、水産業との一体的な提案により地域の魅力向上と経済の活性化へつながる可能性を探るものである。
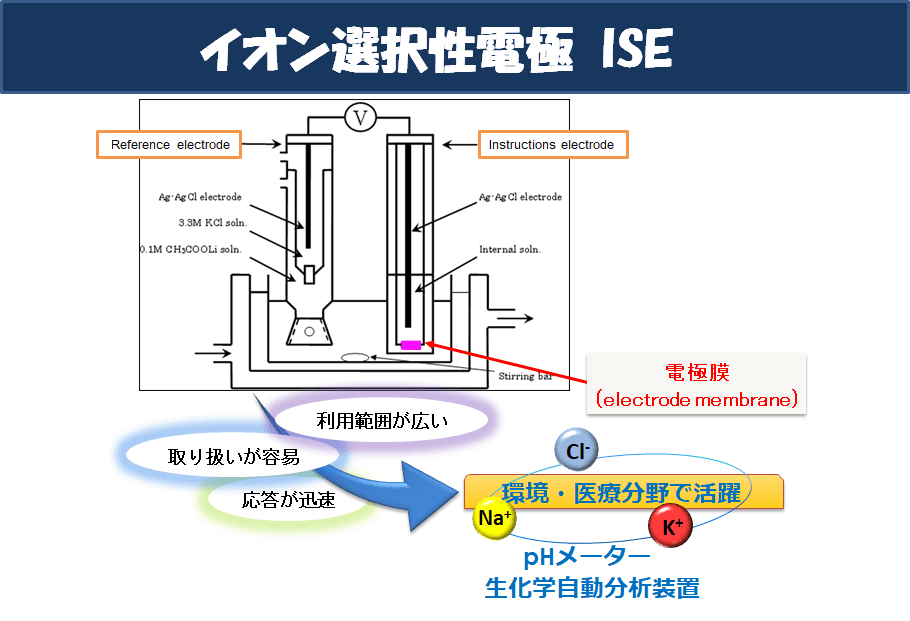
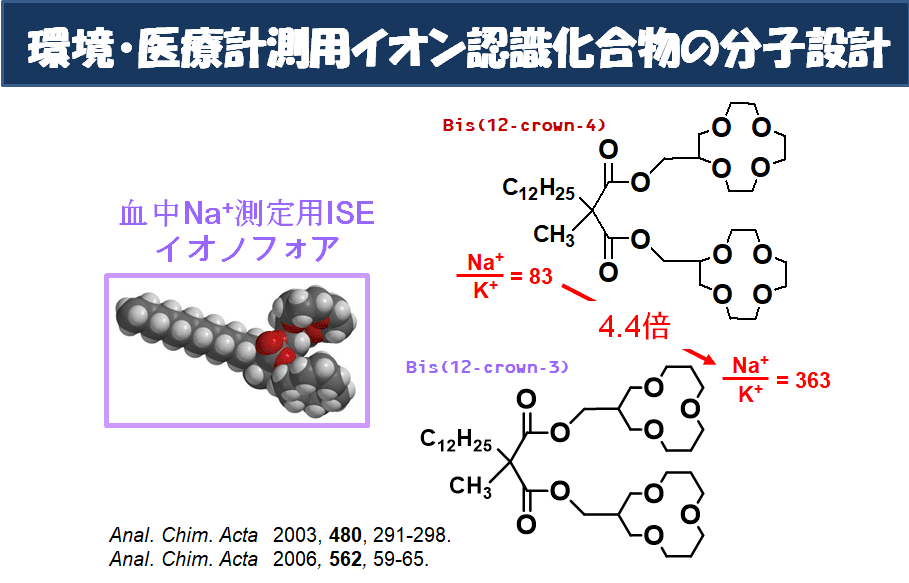
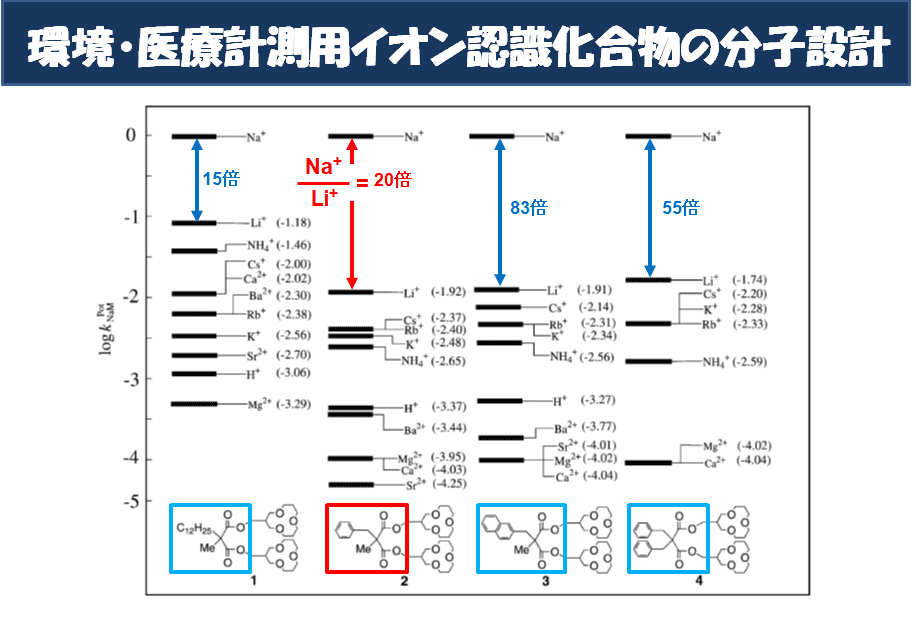
金属イオンは、生体内で、水分調整や代謝などに大きく関与しています。当研究室では、社会の求める実用センサーを目指し、「目的のイオンを識別する認識化合物」を設計・合成しています。 そして、実際に用いられているイオン選択性電極としての性能評価や、センサー部となるイオン感応膜の開発を行っています。
論文
「Proton spin relaxation study with pulsed NMR on the plasticization of Na+ ion-selective electrode membranes prepared from PVCs with different degrees of polymerization」(2020)『Analyst』Vol.145 (No.11)p.3832 - 3838.
「Ionophoric Properties of [14]Tetraazaannulene Derivatives and Substituent Effect on the Cation-selectivity」(2017)『Electroanalysis』Vol. 29 (No. 7)p.1712–1720.
「Conformational analysis of 12-crown-3 and sodium ion selectivity of electrodes based on bis(12-crown-3) derivatives with malonate spacers」(2003)『Analytica Chimica Acta』480p.291-298.
特許
特願2003- 429141特開2005-187369「イオン感応物質およびそれを用いる方法」
特願2002-134654特許第4111742号特開2003-327597「アザアヌーレン誘導体からなるイオノフォア、感応膜、およびそれを用いたイオンセンサ」
特願2001-352192特許第352192号「液晶分散型簡易イオン選択性電極センサならびにそれを用いた素子」
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.