画像認識 AI はどこを見ているの?
さまざまな画像認識AIが提案されていますが、画像のどこを見て認識しているのでしょうか?本研究ではAIの認識箇所を特定する技術であるGrad-CAMを利用して認識箇所を可視化し、どこを見て認識しているかを調べました!その結果から次の提案を考えています。1)画像認識AIの精度比較のために、人間が画像を認識している特徴的な箇所とAIの認識箇所を利用する。2)長年の経験や勘が必要な画像識別技術をAIで再現し、無意識に利用していた画像の特定箇所を明らかにする。
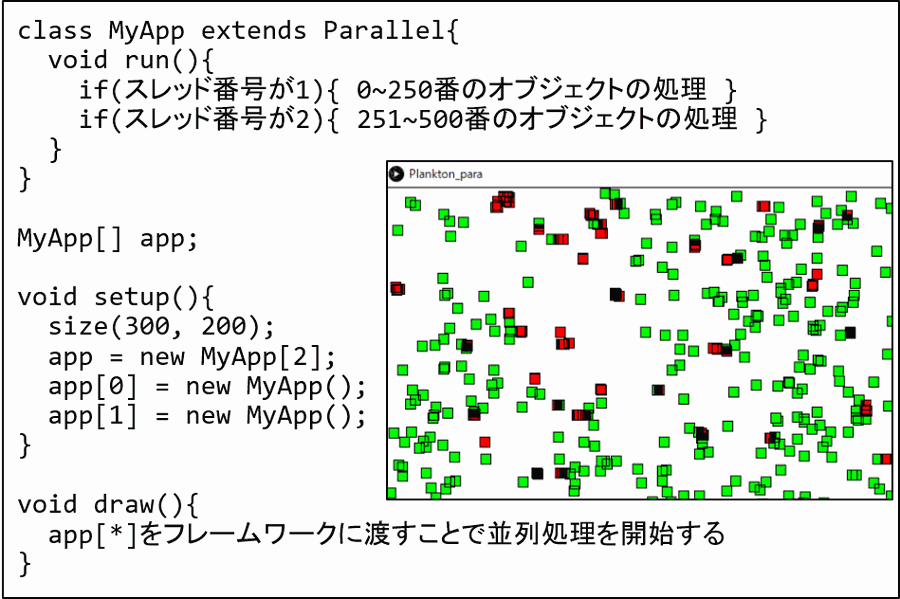
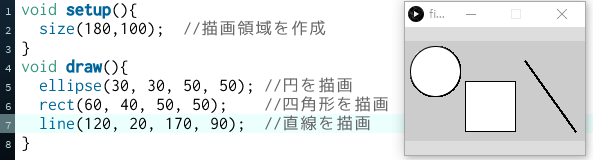
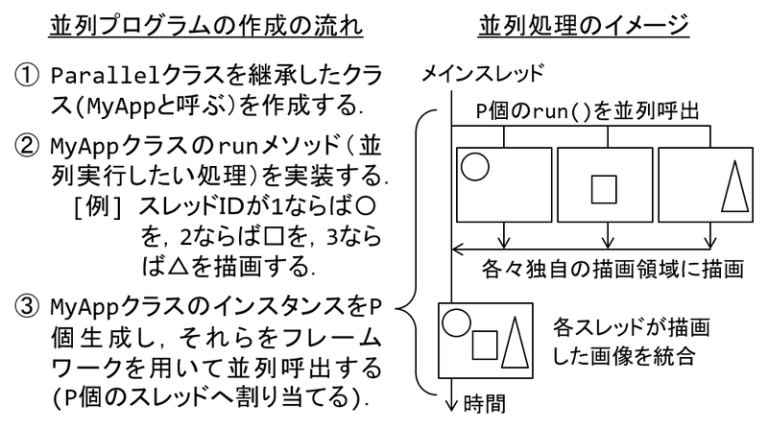
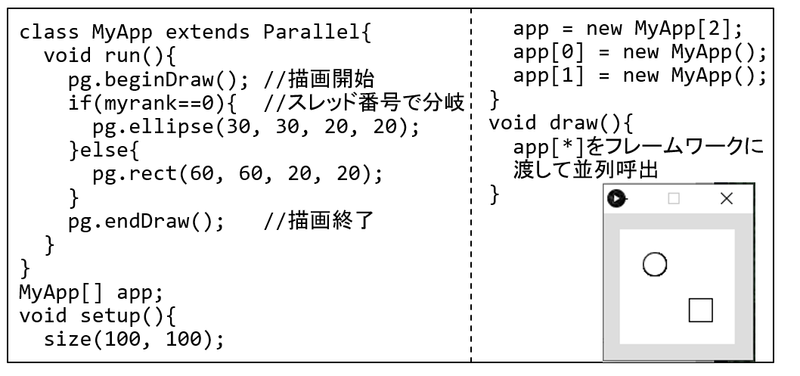
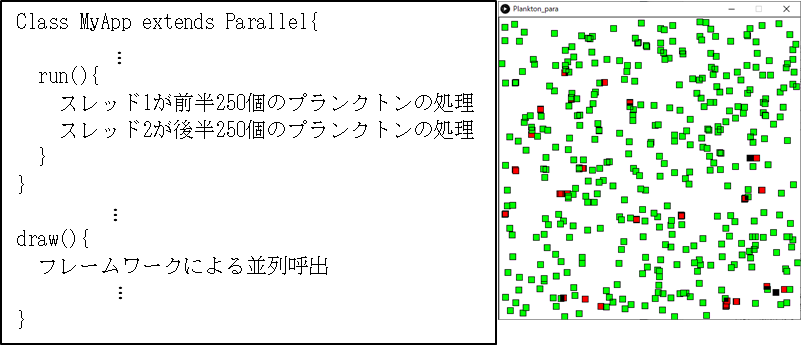
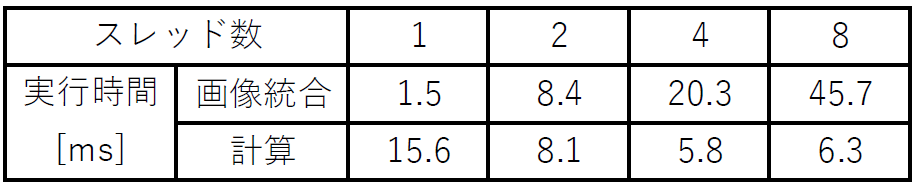
マルチコアCPUの性能を最大限に活用してプログラムを高速実行するためには並列プログラムを作成する必要がある。しかし、一般に並列プログラミングの学習は初学者にとっては容易ではない。その理由として、数値計算問題を題材とすること、および大規模な計算でない限り並列化の効果を実感できないことから、初学者の興味を維持しにくいことが考えらえる。本研究では並列化の効果を体感しやすく、かつ、平易な教材を扱える並列プログラミングの学習環境としてProcessing言語を用いた図形アニメーションプログラムのための並列化フレームワークを提案する。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.