容易に構築できる球面ディスプレイ環境
球面型没入ディスプレイ環境構築をサポートするシミュレータを開発した.球面ディスプレイを作る際には,ドームスクリーンへの特殊な歪み補正を考慮した投影系の光学設計を行う必要がある.しかし,実際に製作される光学系はシミュレーション通りの精度が保証されるわけではない.使用する際に改めて光学系の微調整が必要となる.本研究では,投影系の光学設計と同時に,光学系の微調整や歪み補正が実行可能な投影シミュレータを開発している.
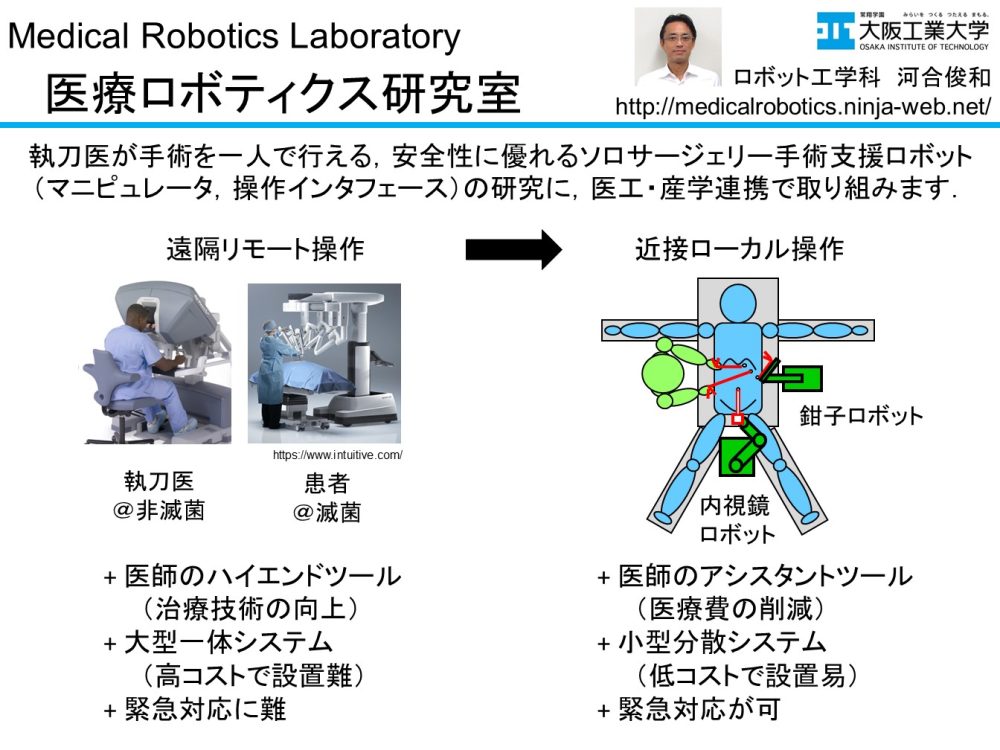
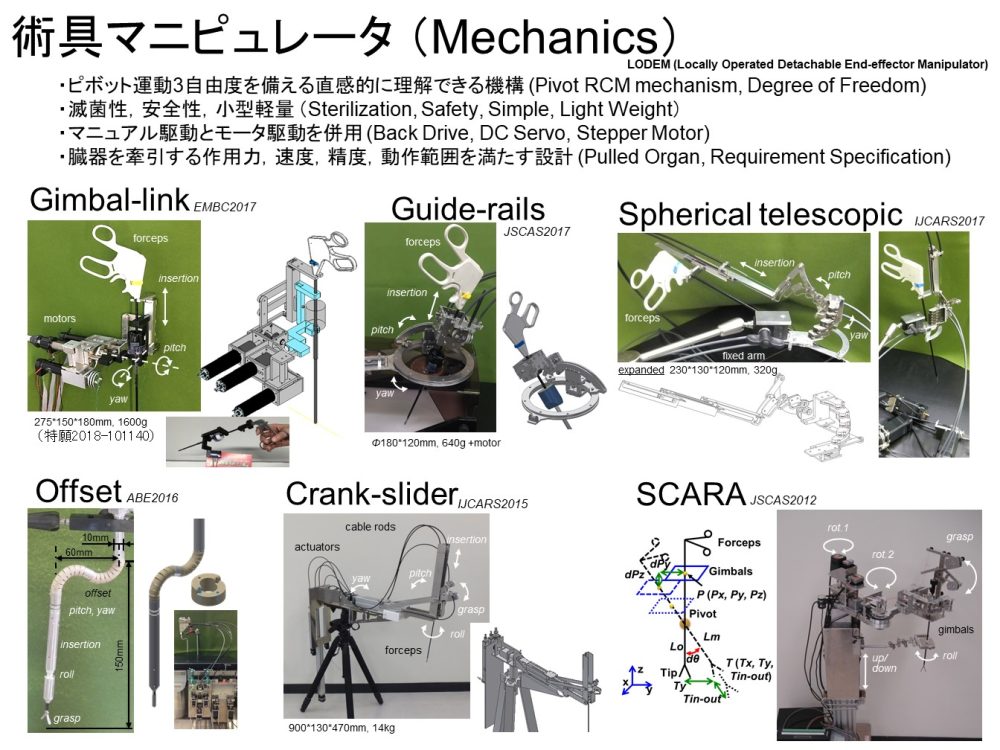
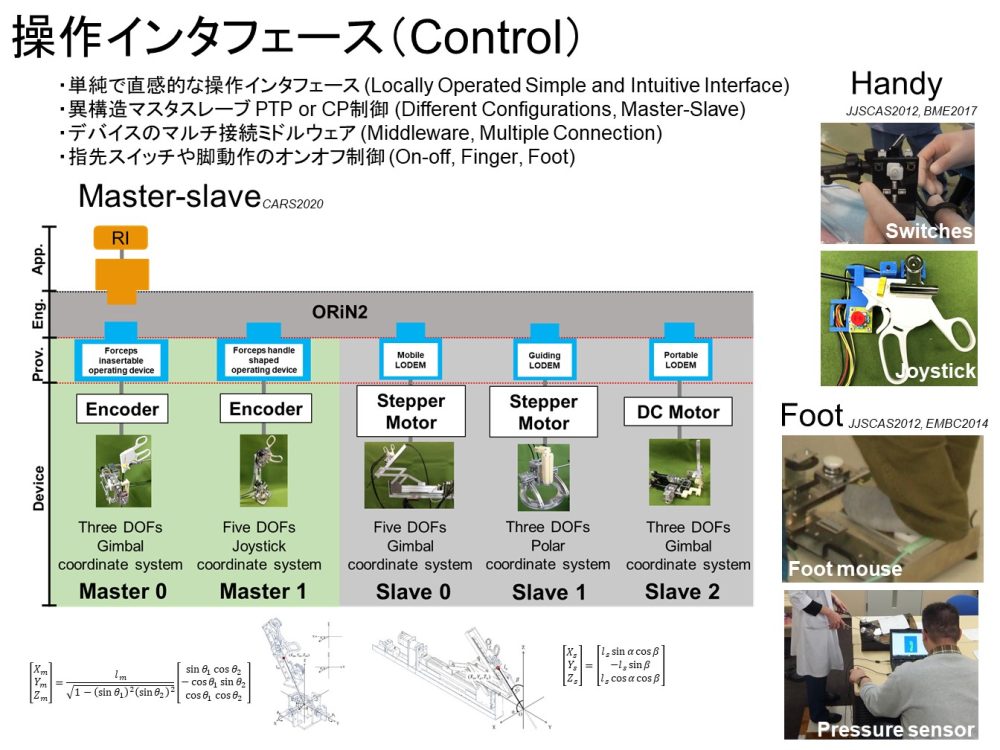
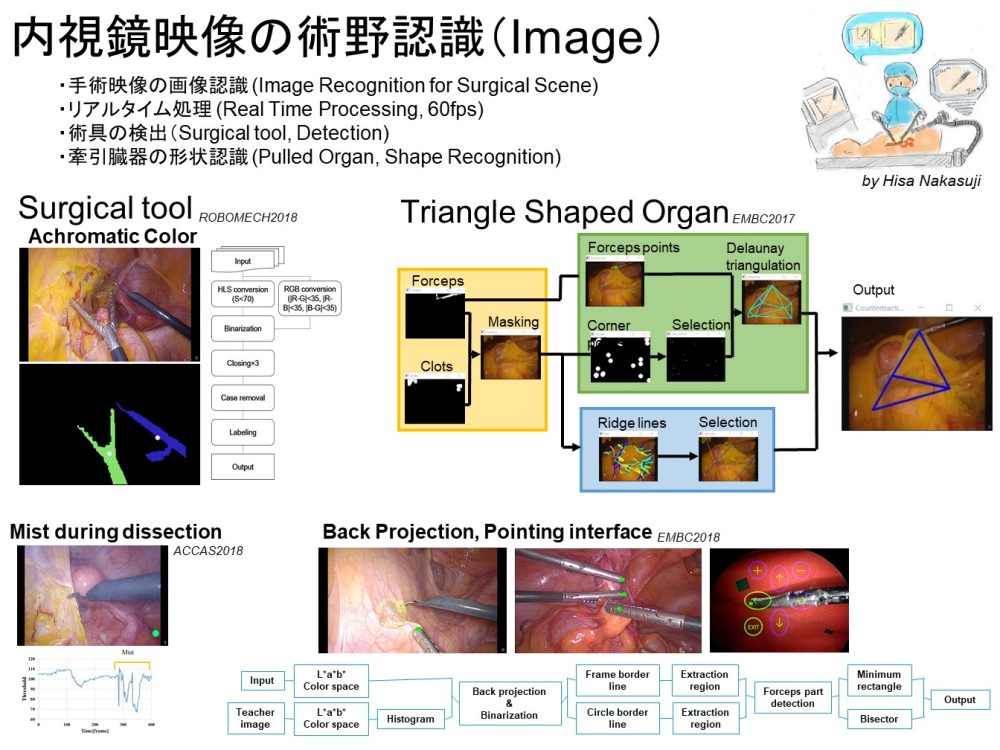
執刀医が手術を一人で行える,安全性に優れるソロサージェリー手術支援ロボットを研究しています. 人と同じ空間に存在し,共存協調して作業を行えるロボット技術の確立を目指して, 内視鏡下手術におけるカメラと鉗子の助手をマニピュレータが担えるよう,医工・産学連携で取り組んでいます. 医師のハイエンドツールであるオールインワンシステムのリモート(遠隔)操作型ロボットに対して, アシスタントツールであるローカル操作型ロボットLODEM(Locally Operated Detachable Endo-effector Manipulator)群は, センシング能力に優れる人と,安定した作業に優れるロボットが補完しあう,インテグレーションです.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.