実行不要な命令を動的に排除する効率的なプロセッサ
プロセッサの命令実行の効率性を妨げる要因の1つとして,ロード命令の実行にかかる時間が大きいことが挙げられる。この研究の目的は,不要なロード命令の一部を動的に排除(スキップ)するようなプロセッサの構成を提案し,命令実行の効率性をあげようとするものである。シミュレーションによる評価からおおよそ15%程度のロード命令がスキップできる可能性があり、また全体のプログラム実行時間をおおよそ8%程度減少させることが期待できる。
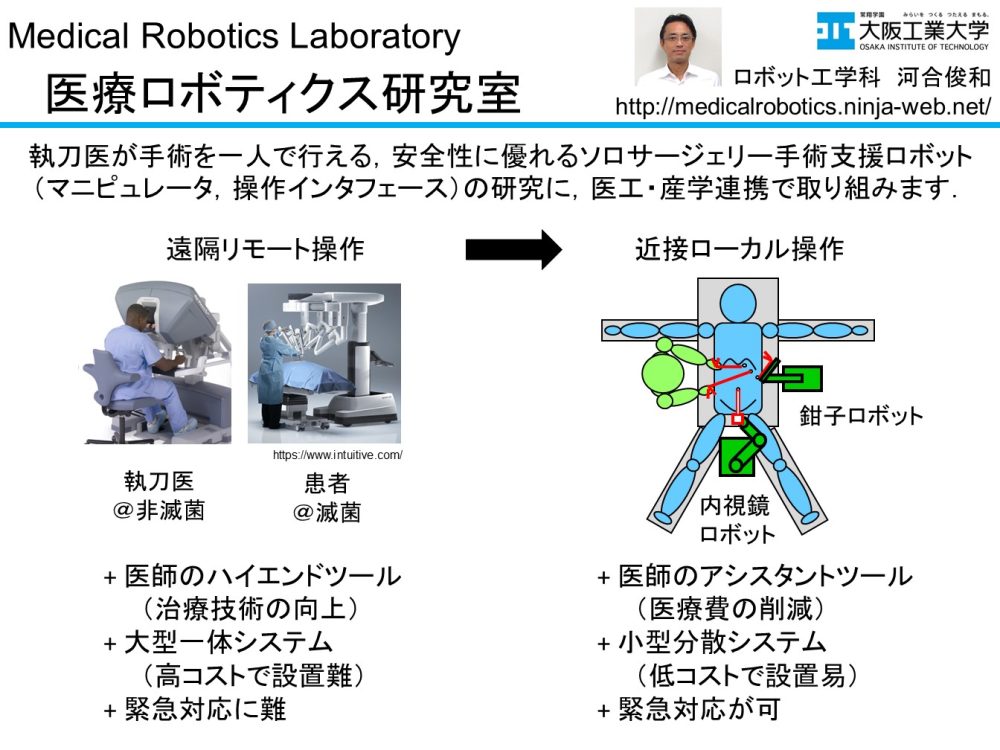
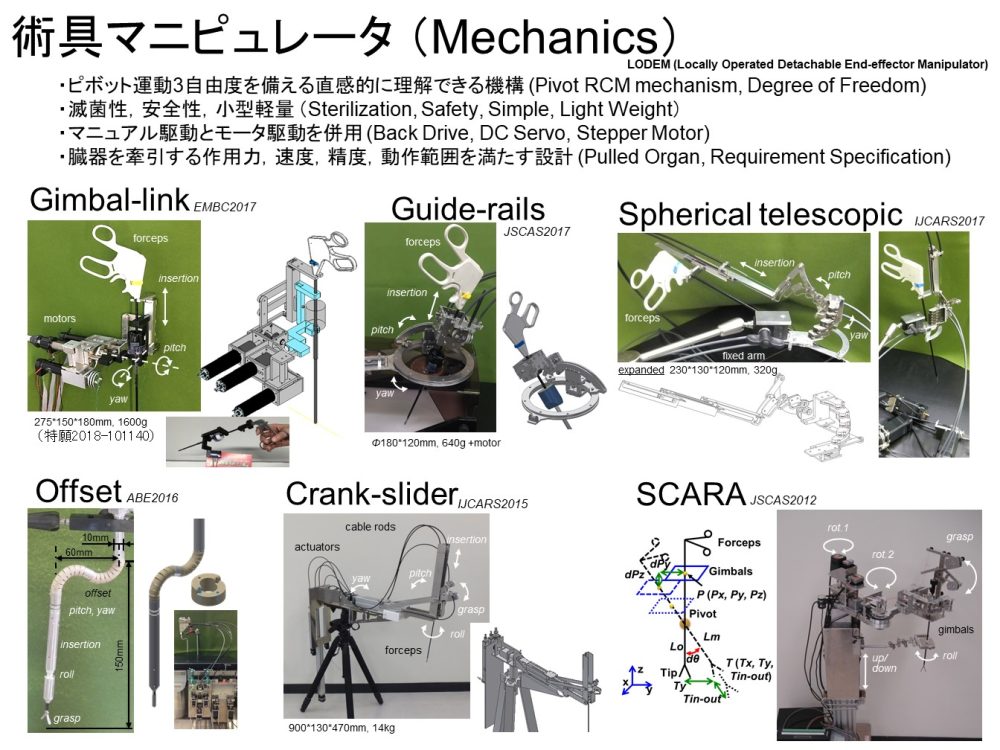
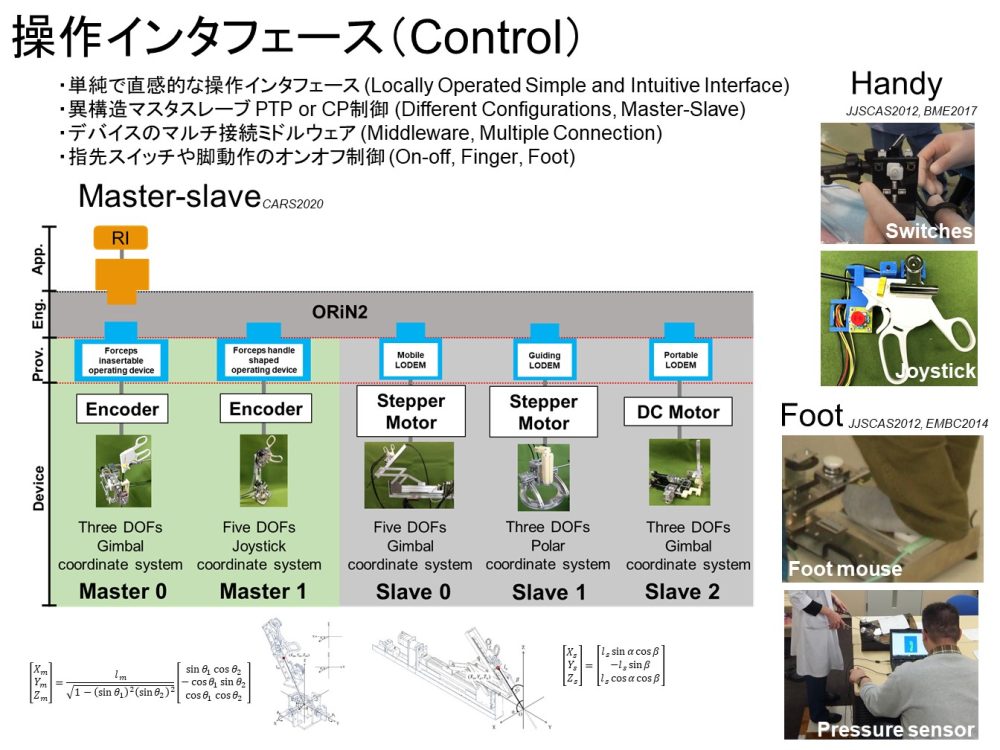
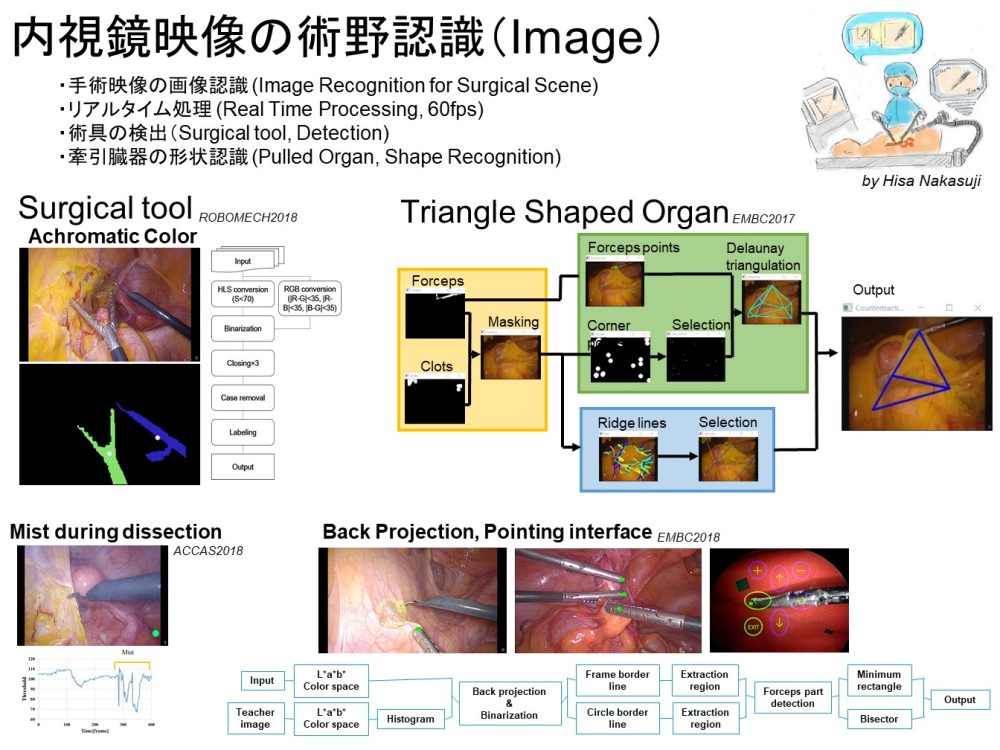
執刀医が手術を一人で行える,安全性に優れるソロサージェリー手術支援ロボットを研究しています. 人と同じ空間に存在し,共存協調して作業を行えるロボット技術の確立を目指して, 内視鏡下手術におけるカメラと鉗子の助手をマニピュレータが担えるよう,医工・産学連携で取り組んでいます. 医師のハイエンドツールであるオールインワンシステムのリモート(遠隔)操作型ロボットに対して, アシスタントツールであるローカル操作型ロボットLODEM(Locally Operated Detachable Endo-effector Manipulator)群は, センシング能力に優れる人と,安定した作業に優れるロボットが補完しあう,インテグレーションです.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.