ドローンの閉ループシステム同定によるモデリングと飛行制御
幅広い産業でビッグデータの活用が進んでいるが,予測・診断・制御・意思決定の精度向上に際してモデルの重要性が近年ますます高まっている.データエンジニアリングのひとつの分野として,システム同定法によるデータ駆動モデリングについて紹介する.具体例として,MOESP型閉ループ部分空間同定法(CL-MOESP)によるドローンの閉ループ同定と,得られた同定モデルを利用した最適制御器設計の事例研究を紹介する.
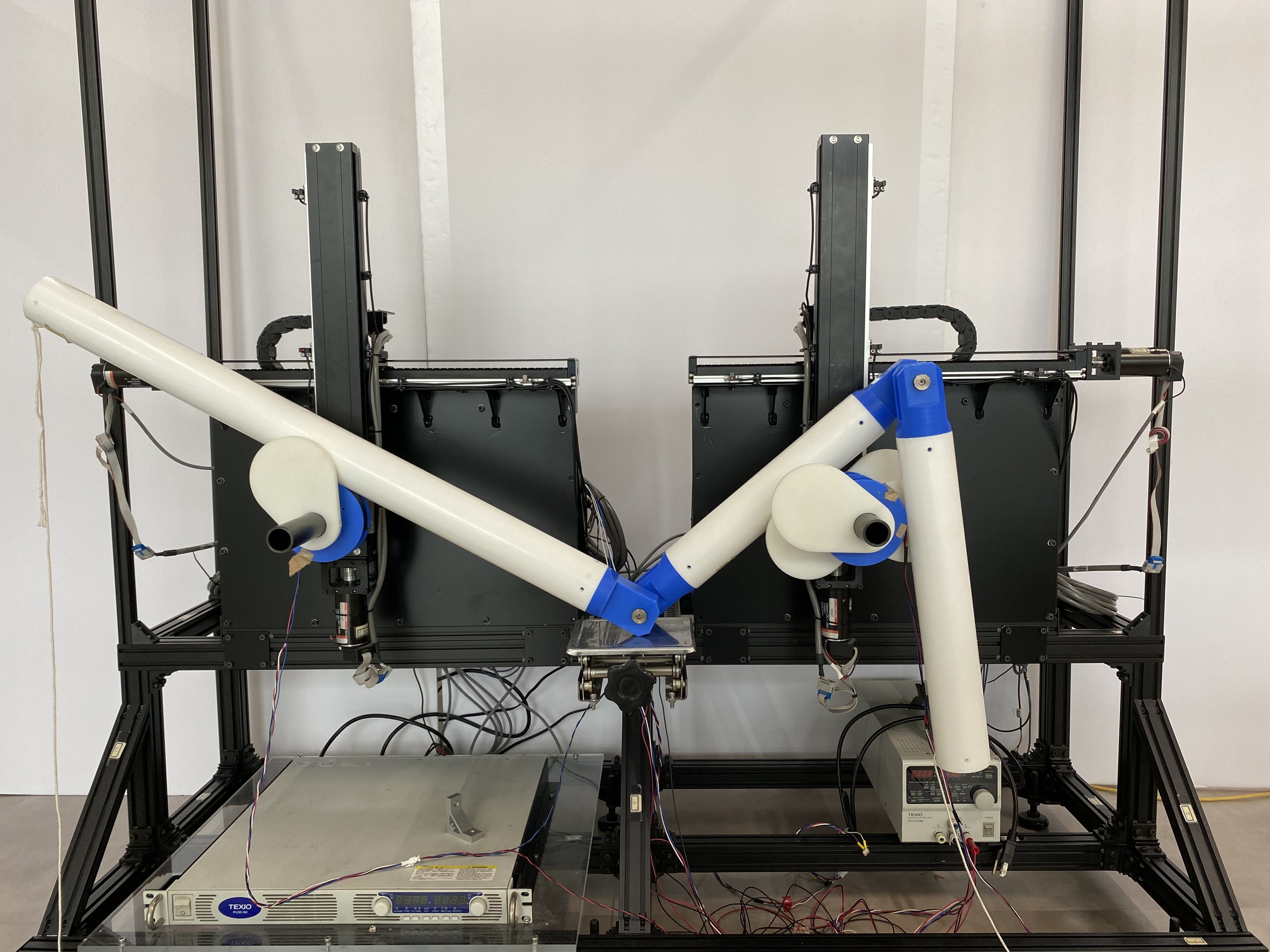
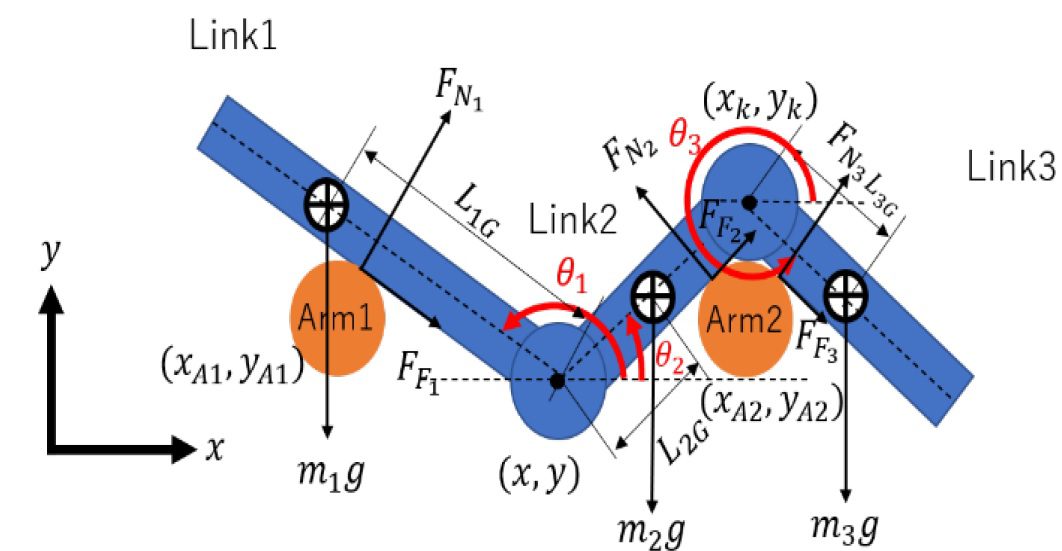
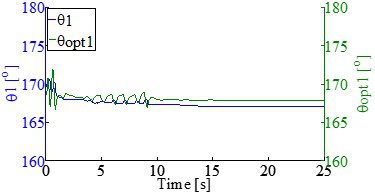
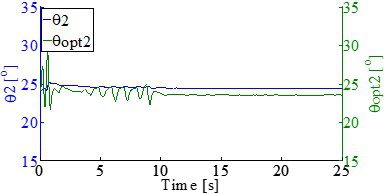
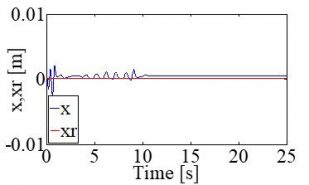
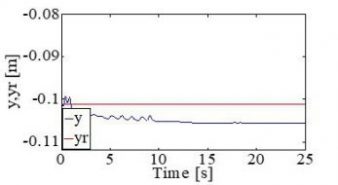
本研究では,力学的な本質を失わず,3次元運動を2次元運動に簡略化し,要介護者を二つの関節を持った3リンクの物体とみなす.そして,非把持双腕ロボットアームとリンクの間の静止摩擦を利用し,3リンク物体がロボットアームから滑り落ちないための安定領域を求め,その中に摩擦力が最も小さくなる姿勢を求める.得られた最適な角度を用いて,ロボットの抱きかかえ制御を行い,3リンク物体の安定支持が実現できることを示す.

論文
「Posture maintenance control of 2-link object by nonprehensile two-cooperative-arm robot without compensating friction」(2019)『IEEE/CAA Journal of Automatica Sinica』6(6)p.1397-1403.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.