移動体の制御に関する研究
自動車や飛行機などの移動体の制御に関する位置計測システム,誘導制御システムの構築を目指して研究を行っている.位置計測システムについては,加速度計,ジャイロ,画像処理を用いた計測を融合し,移動体の位置を瞬時に計測することを目標にしている.誘導制御については,移動体の3次元的位置姿勢を制御するため,制御システムの動的特性を推定する同定を行ない,安定化制御を実現することを目標にしている.
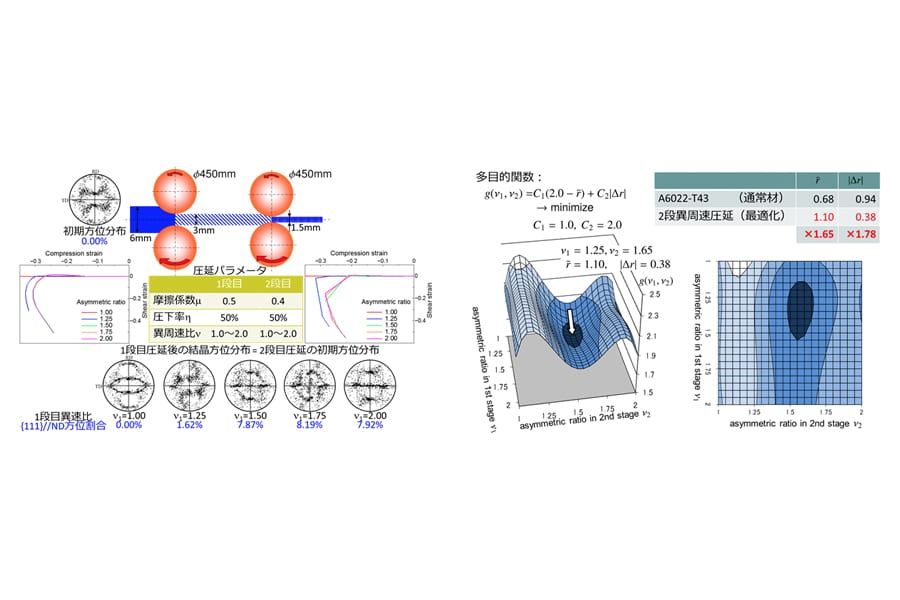
金属材料の機械的特性は,材料の微視的な多結晶構造,特に優先方位や結晶粒径に大きく依存する.微視結晶構造制御に基づく高機能材料の創製のためには,熱的影響を含む材料の加工過程における塑性変形過程の結晶集合組織発展の非線形解析手法と加工プロセスパラメータの最適化の確立が必要である. 本研究においては,塑性変形誘起の集合組織発展に加え,熱的負荷による動的再結晶を解析可能なマルチスケール熱・結晶塑性有限要素解析コードを開発した.これにより自動車用ボディ板材のAl合金板材の圧延創製過程のプロセス最適化が可能となる.
論文
「動的再結晶を考慮したマルチスケール結晶塑性有限要素法によるAl合金板材の熱間圧延解析」(2019)『日本機械学会 第32回計算力学講演会』
「Development of Multi-scale Thermo-coupled Elastic-crystalline Plasticity Finite Element Code to Predict Dynamic Recrystallization」(2019)『 Asian Pacific Congress on Computational Mechanics (APCOM)』
「結晶塑性マルチスケール解析による異周速圧延プロセス設計」(2009)『塑性と加工』50-578p.242-248.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.