移動体の制御に関する研究
自動車や飛行機などの移動体の制御に関する位置計測システム,誘導制御システムの構築を目指して研究を行っている.位置計測システムについては,加速度計,ジャイロ,画像処理を用いた計測を融合し,移動体の位置を瞬時に計測することを目標にしている.誘導制御については,移動体の3次元的位置姿勢を制御するため,制御システムの動的特性を推定する同定を行ない,安定化制御を実現することを目標にしている.
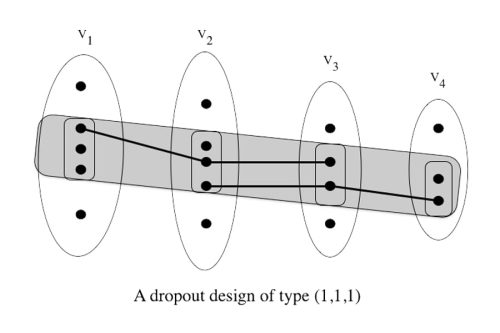
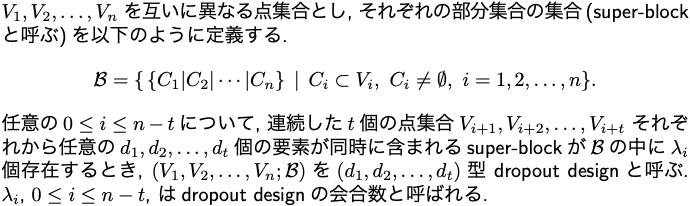
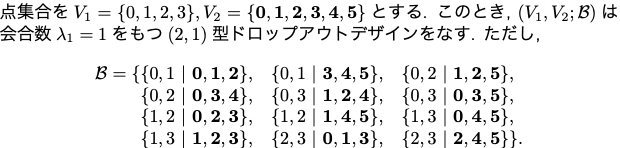
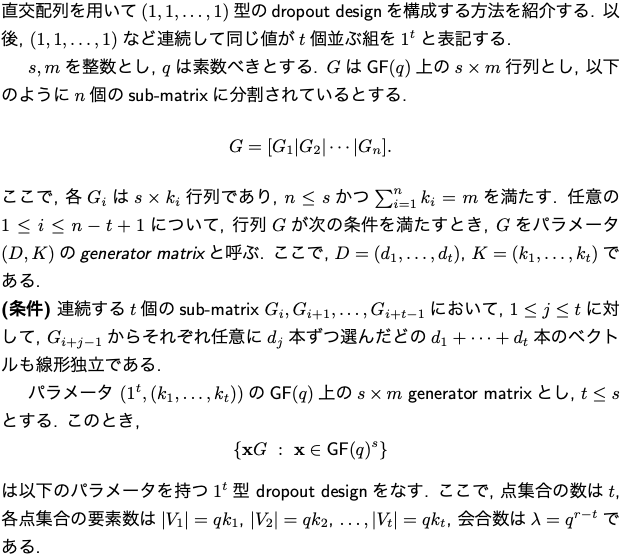
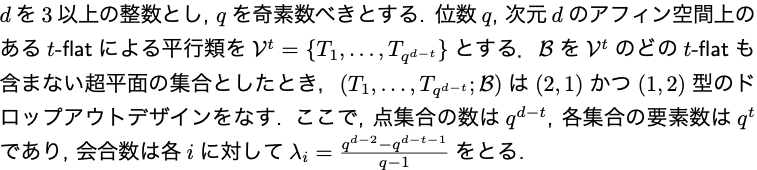
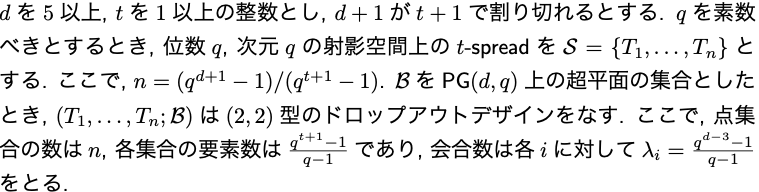
深層学習においてドロップアウトと呼ばれる手法が用いられている. これは多層型 ニューラルネットワークにおいて, その層ごとに一定の確率でノードを無効にして学習 を行う手法である. 訓練データに過度に適応した学習をしてしまう過学習と呼ばれる 現象に対して有用であるとされ広く使用されている. ドロップアウトを用いたとき, 各 ノードの使用頻度のばらつきは小さくなるが, 層間の辺の使用頻度のばらつきは大きく なる. 本研究では, ドロップアウト法において辺の使用頻度を一定にするような組合せデザイン (dropout design) を定義し, 関連する組合せ構造についてまとめ, その構成法について提案する.

研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム