トモグラフィー画像の3次元可視化プログラムの作成
情報科学部
情報システム学科
Scientific Visualization研究室
鎌倉快之
准教授
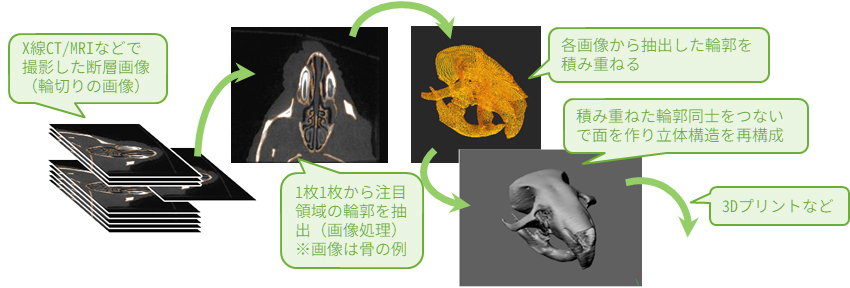
X線CTやMRIなどで撮影したトモグラフィー像(断層画像)の中から,注目領域だけを検出したり,立体構造を想像することは容易ではありません.画像処理技術や手法の応用により,注目領域のセグメンテーションとラベリング,立体構造の再構成を行い,三次元可視化するためのソフトウェアの開発に取り組んでいます.
論文
「A Novel Approach for Investigating Upper Airway Hyperresponsiveness Using Micro-CT in Eosinophilic Upper Airway Inflammation such as Allergic Rhinitis Model」(2019)Van BuiDan『Biomolecules』9(7)p.252.
「HawkC: computer-aided 3D visualization and analysis software for electron tomography(IMC2014発表論文一覧) -- (Type of presentation : Oral)」(2014)MidohYoshihiro『大阪大学超高圧電子顕微鏡センター年報』43p.33-35.
「R-centipede モデルを用いたトモグラフィー電子顕微鏡像からの輪郭抽出の高速化手法」(2013)鎌倉快之『医用画像情報学会雑誌』30(4)p.95-100.