
人同士のコミュニケーションを支援する
会話時の声の音響的特徴(ピッチ、パワー、周波数特性など)及びしぐさの動的特徴の時間変化度合いを観察することで、会話が楽しく進行しているかそれともギクシャクしているかなどの会話の雰囲気を推定できることがわかってきました。この技術を用いた会話支援システムを構築中ですが、他にも、高齢者の理解度衰え推定、場の雰囲気盛り上げシステム、学習支援システムなど、幅広いアプリケーション展開を図っています。
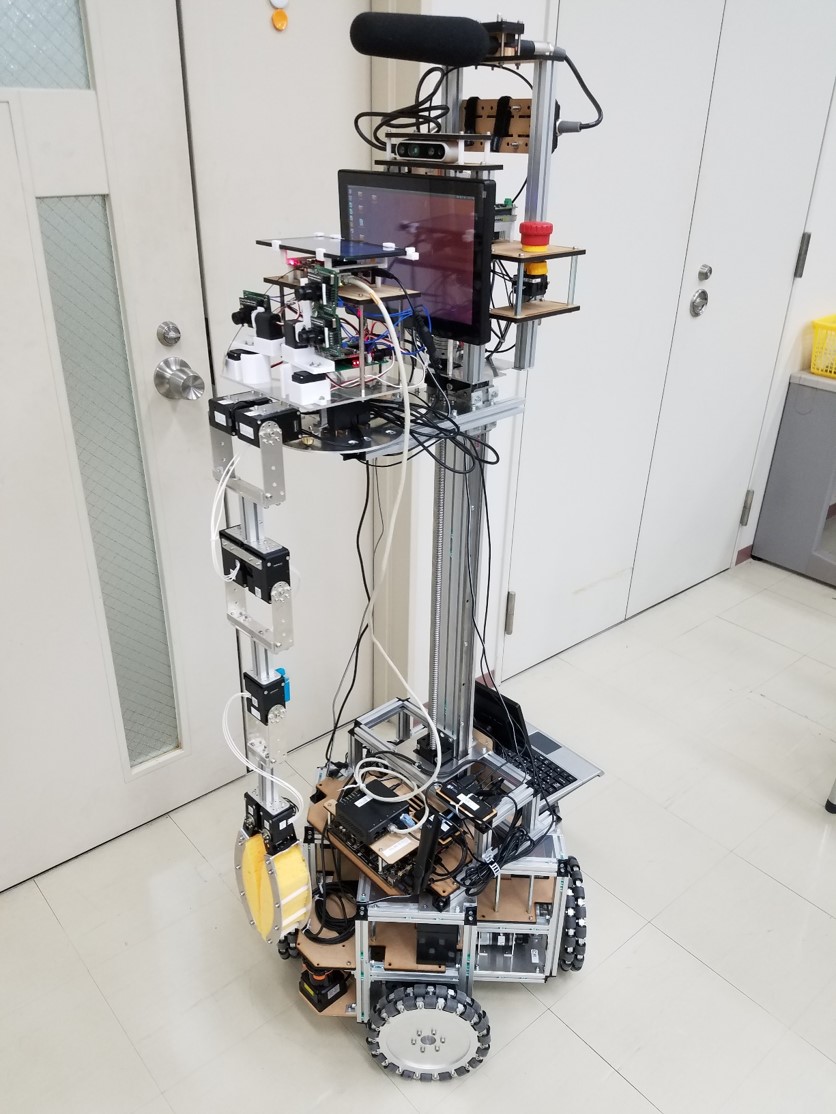
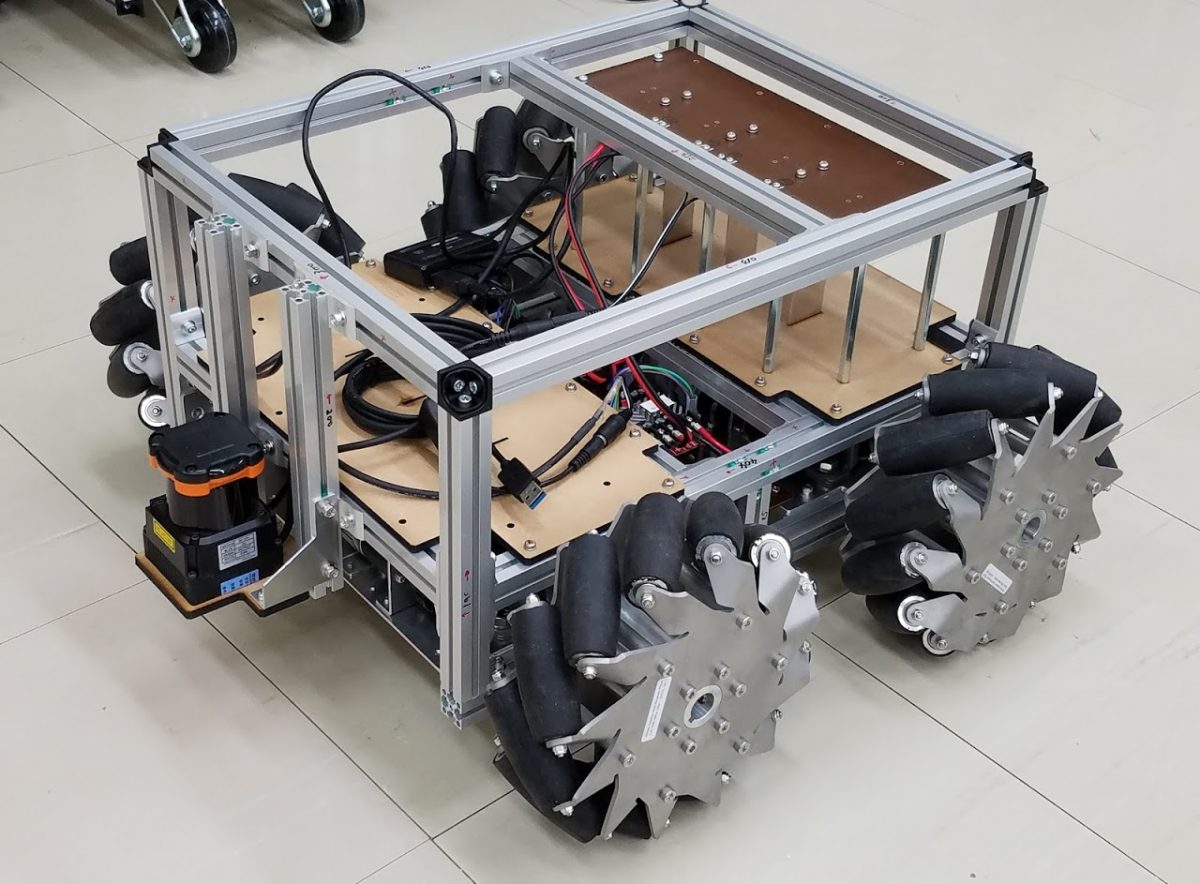
大阪工業大学ではロボカップジャパンオープンにおいて@ホームリーグという競技に2011年から参加し,PBLのテーマとして活用している. PBLにおいては小型の車輪移動ロボットと大型の競技用ロボットを使い分け,効率的に学習を進められるように配慮している。


研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム