流域治水の思想を踏まえた新たな河川整備への挑戦
これまでの河川の開発は、治水・利水計画規模に対して必要な施設を建設してきました。しかし近年、これらの計画を超過する洪水・土砂災害が発生し、激甚化しており、現状の整備水準や将来の計画では“まち”を守れないきれない時代に,じわじわと突入しています。 これからの我が国は、洪水・氾濫の発生を許容できる粘り強い“まち”が求められます。本研究では水害特性を過去から読み解き、将来を高精度に予測し、その変化に適応した“まちづくり”を考究し、提案します。
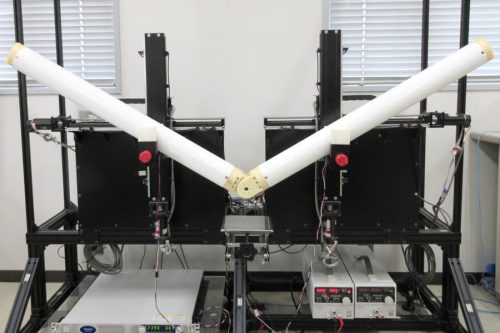
本研究では,力学的な本質を失わず,3次元運動を2次元運動に簡略化し,要介護者を一つの関節を持った2リンクの物体とみなす.そして,非把持双腕ロボットアームとリンクの間の静止摩擦を利用し,リンクがロボットアームから滑り落ちないための安定領域を求め,最も滑り落ちにくい角度を求める.得られたロバスト角度を用いて,ロボットの抱きかかえ制御を行い,リンクが動いてもリンクの安定支持が実現できることを示す.








論文
「Posture maintenance control of 2-link object by nonprehensile two-cooperative-arm robot without compensating friction」(2019)『IEEE/CAA Journal of Automatica Sinica』6(6)p.1397-1403.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム