話者の意図を適切に伝達可能な多言語間対話支援手法
医療従事者と外国人患者の間の対話支援を目的とした,多言語対話支援手法について述べる.医療現場において母語が異なるために意図の伝達が円滑に行えない問題を解決するために,用例対訳と機械翻訳を併用した多言語間対話支援技術の開発を行っている.本技術では,用例対訳や回答候補などの概念を用いて正確な意図の伝達を支援している.
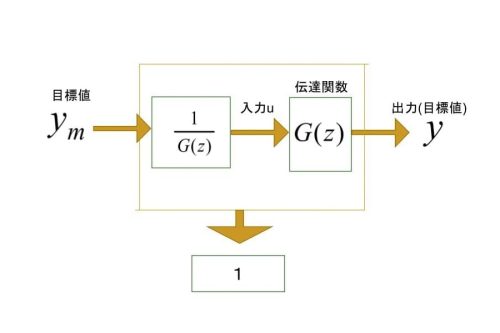
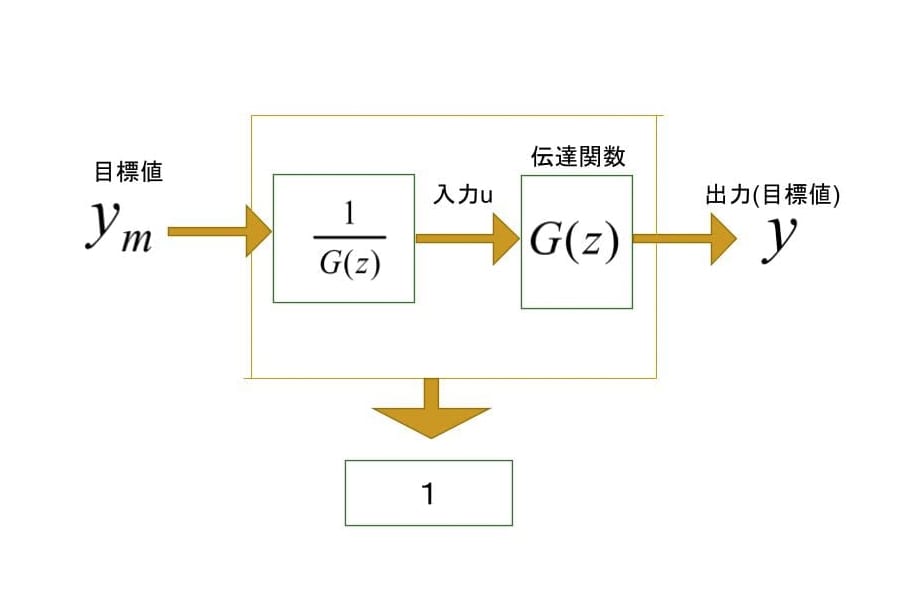
追従制御系を構成する際、制御対象の伝達関数に対して、その逆数を前置補償器として用いる方法が考えられる。この補償器は微分器を含み、その部分をインタラクタという。一入出力系では、インタラクタは伝達関数の相対次数を有する多項式とすればよい。しかし、多入出力系においてはインタラクタは多項式を要素とする行列になり、伝達関数の相対次数以外に、そのパラメータにも依存するため導出も難しい。本研究では、出力数が入力数よりも多い系に対してインタラクタに関連する様々な問題、例えば特異な重みを有するLQ問題の解の陽表現、最大非可観測化問題、状態フィードバックにより逆インタラクタ化、不変零点の計算法などを考える。
論文
「状態フィードバックによる擬似インナー化制御」(2016)『電気学会論文誌C編』136(12)p.1829-1835.
「A simple derivation of the interactor matrix and its applications 」(2009)『International Journal of Systems Science』40(11)p.1197 - 1205.
「Suboptimal exact model matching for multivariable systems with measurement noise」(2000)『IEEE Transactions on Automatic Control』45(6)p.1170-1175.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム