デジタル画像相関法によるき裂・欠陥の非破壊検査
負荷を受ける部材の表面画像を2枚(時間差1秒程で2枚撮影する)利用して、表面のひずみ分布を非接触で評価するデジタル画像相関法援用変位・ひずみ評価システムを構築した。さらにこれを発展させ、き裂や欠陥に生じる特有のひずみ場を利用することにより、き裂・欠陥の有無は言うに及ばず、き裂周りの応力や応力拡大係数といった力学量を高精度に非接触評価できるシステムを開発した。

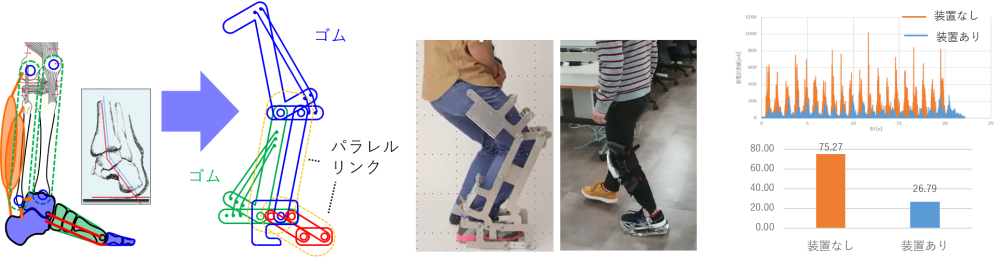
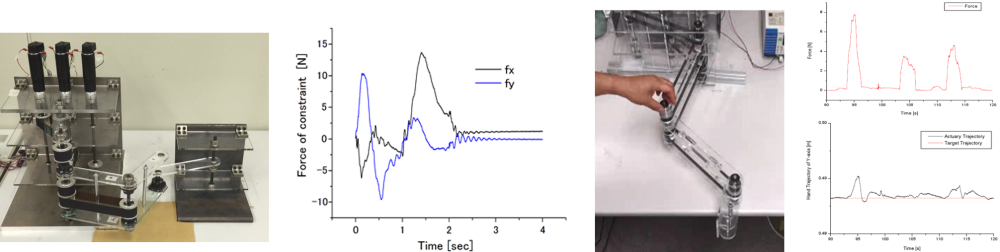
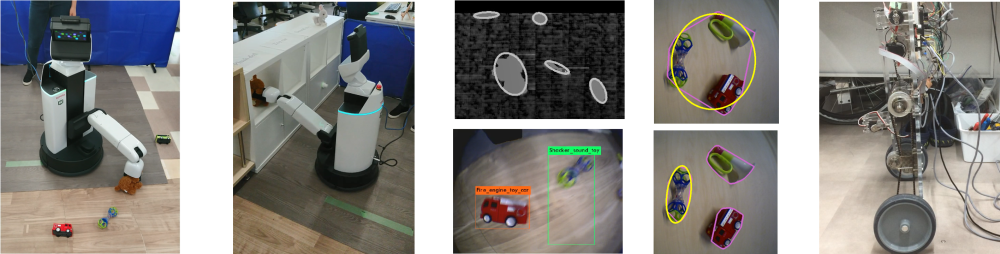
人間の神経系や筋骨格系の構造は長い進化の過程で日常生活を行うのに適した形に最適化されてきたものと考えられています。本研究では進化の過程で生物が獲得してきた運動制御メカニズムをロボットに取り入れることにより,動力を使用せずに人やモノの自重を支持できる機械式自重補償装置や,脳の運動制御メカニズムを取り入れた環境適応制御,小脳-大脳基底核をモデル化したニューラルネットワークによる予測的な環境認識・最適行動生成を実現する研究を行っています。

論文
「腱機構を用いた機械式下肢パワーアシスト装置」(2010)『バイオメカニズム』20p.111-122 .
「脳の運動制御系のモデル化とそのロボット制御への応用」(2009)『システム/制御/情報』53(12)p.518-523 .
「遅延力フィードバックを用いた腱駆動型ロボットの生体模倣型起動追従制御」(2007)『システム制御情報学会論文誌』20(10)p.387-395.
特許
特願2011-002376
特願2009-37380
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム