衛星夜間光データを用いた停電地域の把握
災害による停電地域の早期復旧に向けた被害状況の把握には,二次災害リスクを軽減するため遠隔で受動的に得られるデータが求められている.本研究では,2019年台風15号を対象に,千葉県における停電地域と,人工衛星により観測される夜間における地表面の光強度(輝度)とを比較し,停電地域の推定を行った.その結果,市街地では復旧により輝度が大きく変化するが,山間部では判別が難しいことが明らかになった.
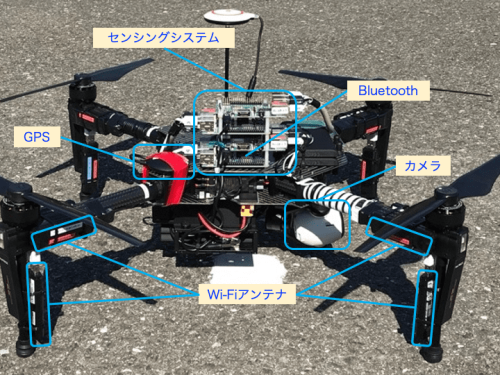
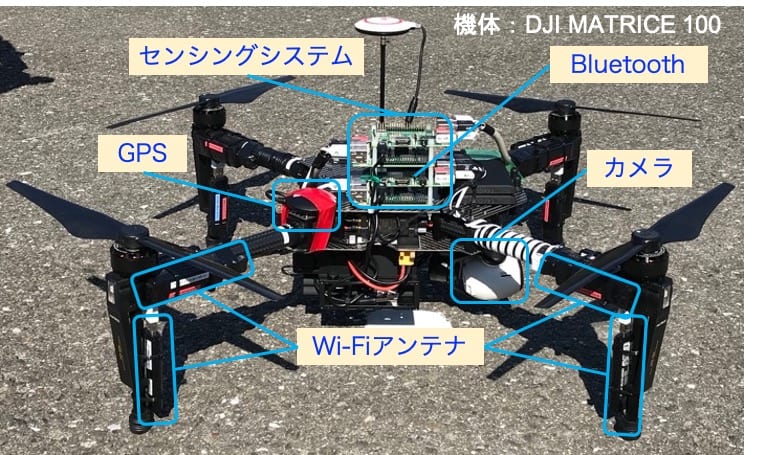
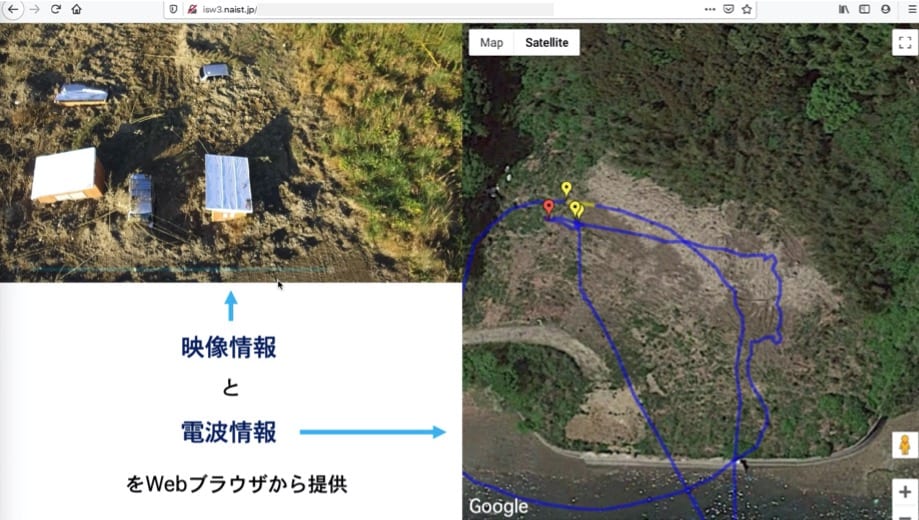
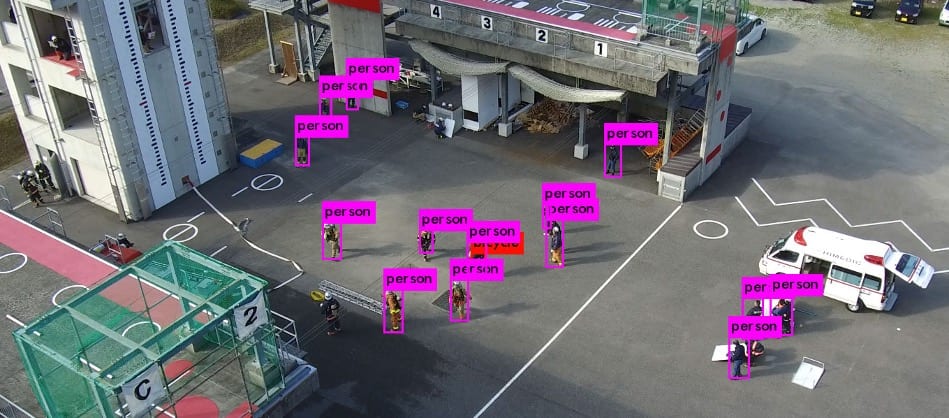
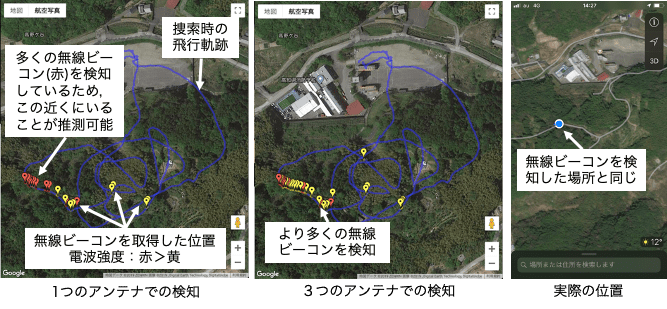
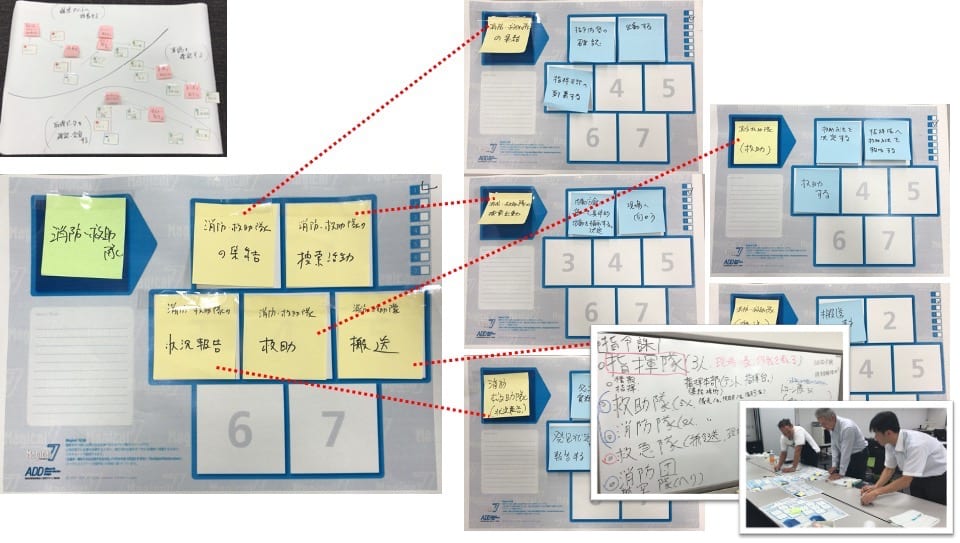
ドローンが登場して10年が経ちますが,消防防災活動におけるドローンの利活用状況は期待にはまだ追いついていません.本研究活動では,消防防災活動でのドローンの利活用の定着に貢献すべく,開発に加え,運用も含めた研究活動を,実務者である消防隊員や分野を超えた研究者等と連携し進めています.現在,ドローンの利活用方法の一つとして捜索活動を対象に,可視情報(映像情報)と不可視情報(電波情報)を収集・提示するためのシステム開発と,ドローンの利活用に必要な訓練や運用方法に関して取り組んでいます.





論文
「Wi-SF: Aerial Wi-Fi Sensing Function for Enhancing Search and Rescue Operation」(2019)『2019 IEEE Global Humanitarian Technology Conference (GHTC)』p.423-426.
「Towards Practical Utilization of Unmanned Aerial Vehicle in Disaster Mitigation - UAV Operation Drill -」(2019)『2019 IEEE Global Humanitarian Technology Conference (GHTC)』p.414-415.
「Supportive Information to Find Victims from Aerial Video in Search and Rescue Operation」(2019)『The 2019 IEEE International Conference on Internet of Things and Intelligence System (IoTaIS)』p.56-61.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム