空間の「ゆがみ」と避難経路
都市居住者の認知空間を取り出し,居住者が認知するまちの姿と現実空間の差違を明らかにすることで,都市空間における「ゆがみ」を抽出することを目的としています。最終的には,このゆがみをもとに,災害時の避難経路と避難場所の設定手法を提案することを目標とします。早く着きたいと思いながら避難しつつなかなか進まない経路と,よく知っていて好きな道であっという間に着く経路がある可能性があり,広く,安全なというイメージも合わせて日常的に接する形成されている可能性をみいだしました。
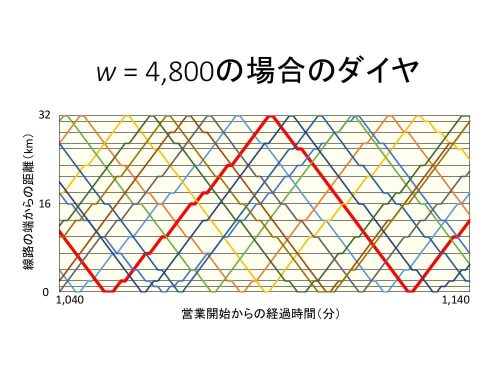
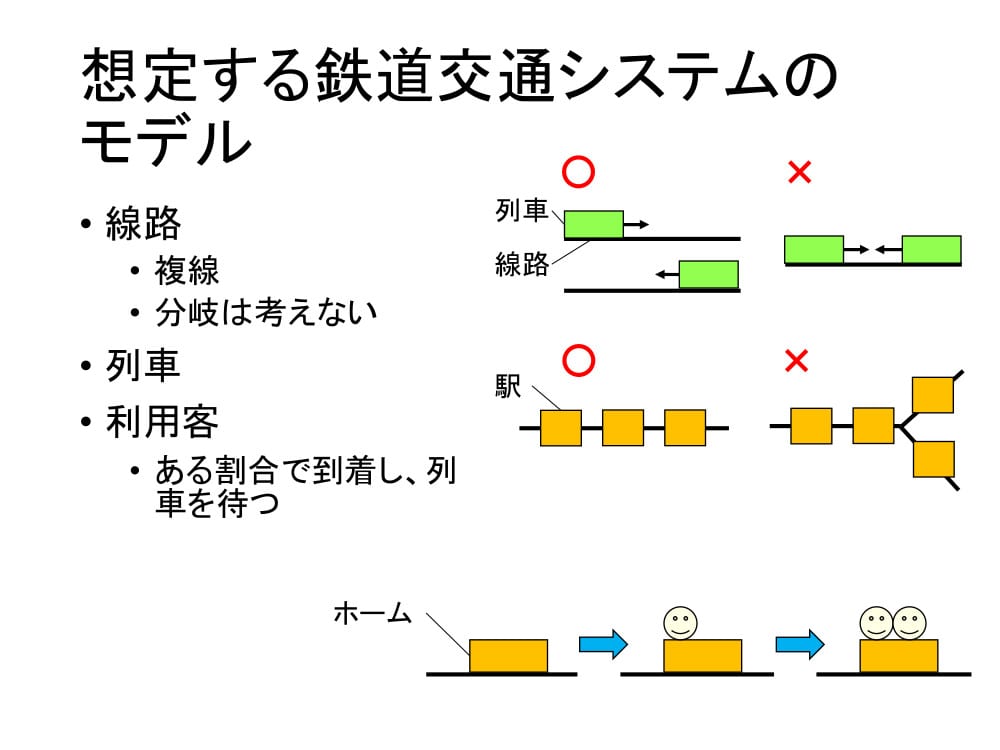
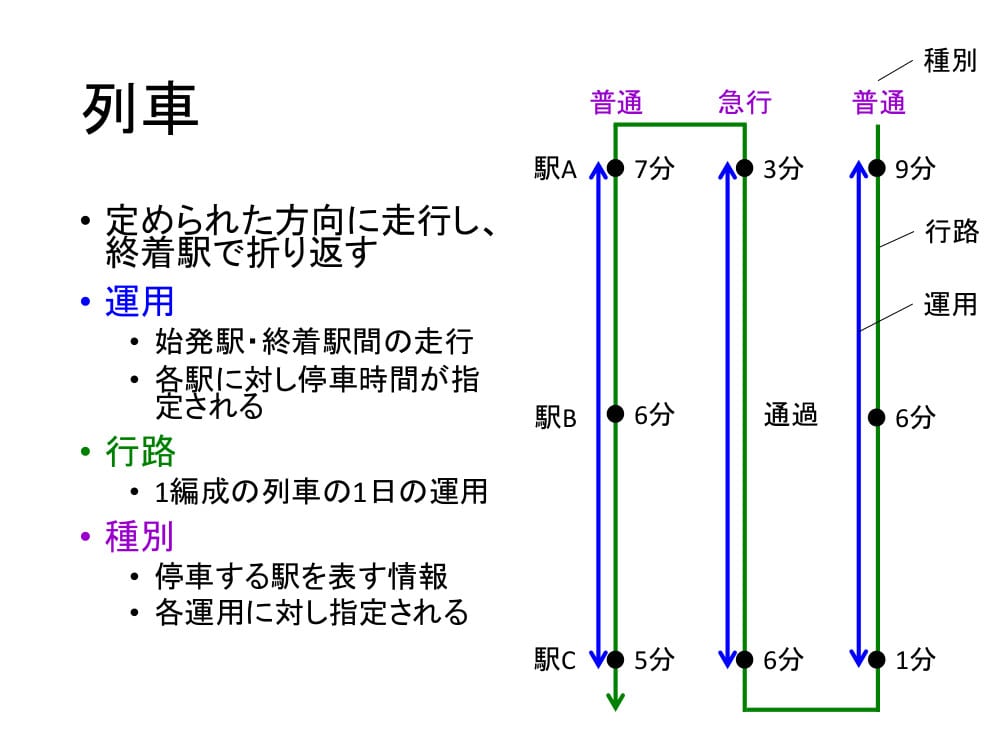
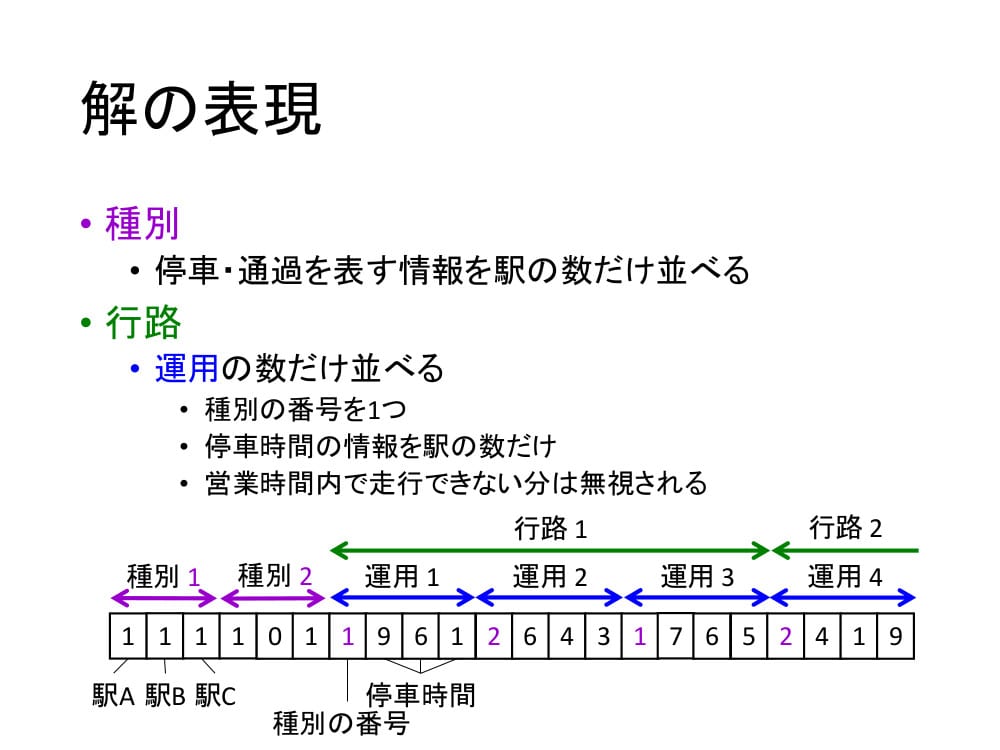
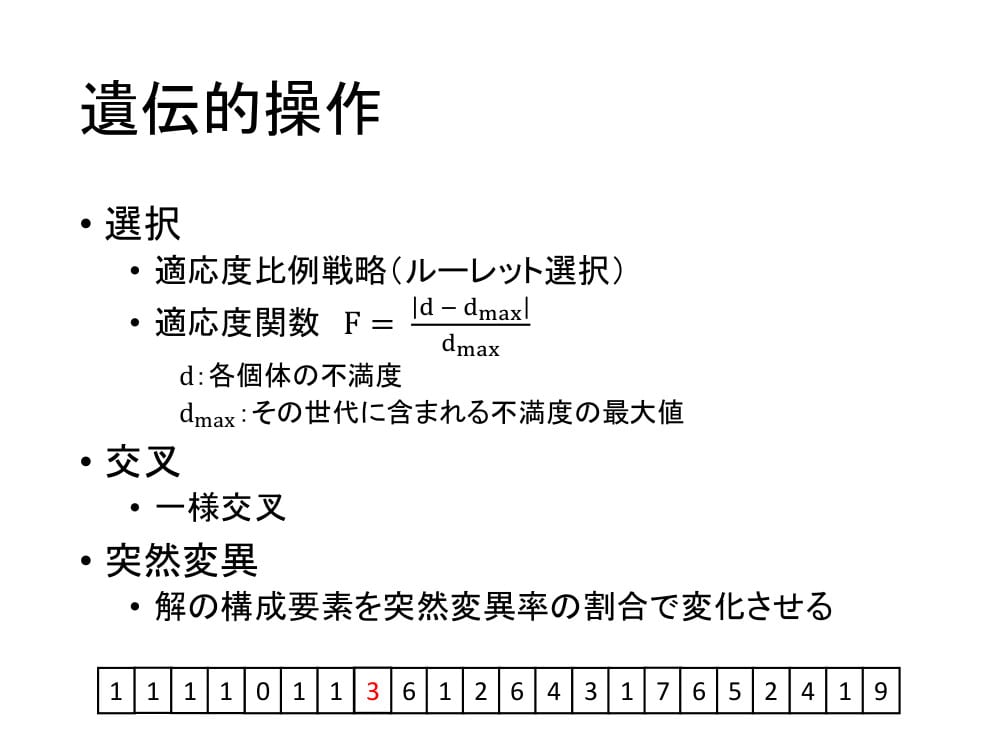
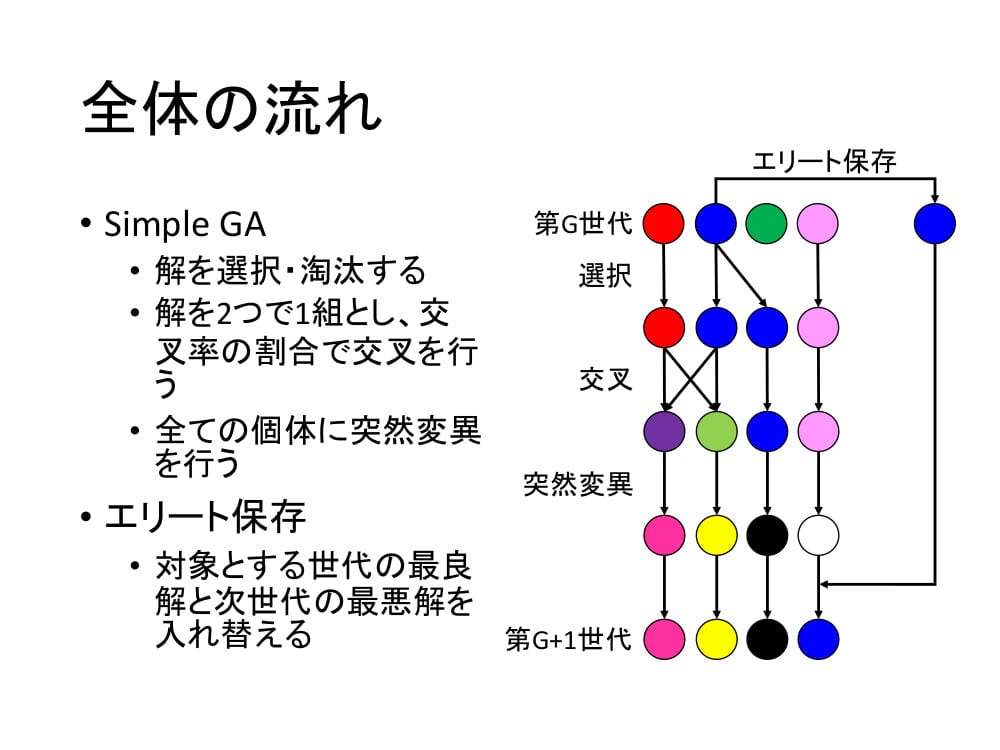
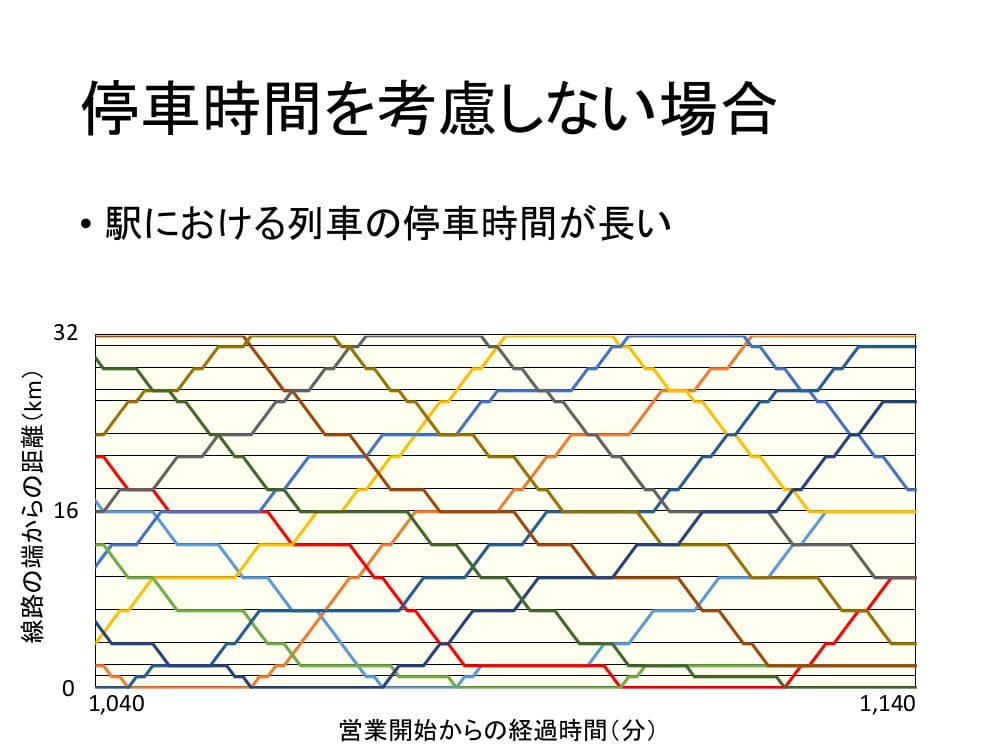
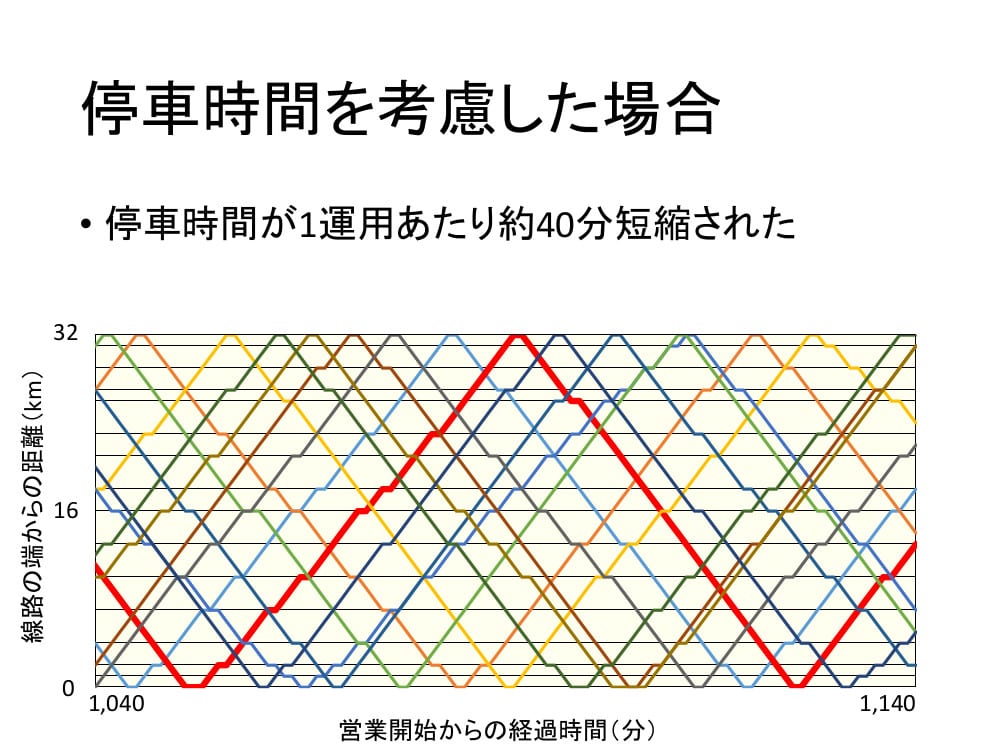
現代社会において鉄道は不可欠なものとなっており、鉄道ダイヤの乱れは多くの人に影響を及ぼす。しかしダイヤの乱れは様々な原因によって生じるため、完全になくすことは難しい。ダイヤの乱れが生じると運行計画の変更を行う必要があるが、変更案の作成は人手に頼らざるを得ないため、多大な時間が必要となる。そこで本研究では、研究の最初の段階として、遺伝的アルゴリズムを用いて鉄道ダイヤの自動生成を試みる。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム