
照明変化に頑強な小型知能ビジョンシステム
本技術のコアは,視覚神経系が行っている情報処理(視覚信号の対数変換や空間バンドパスフィルタ等)を実装した回路にある.本回路は,視覚神経系を模倣した並列演算を活用して,省電力で,照明強度や照明色の変化にほとんど影響されることなく多数の視覚特徴(色・方位別輪郭等)を検出することが出来る.この回路を実装したFPGAとイメージセンサからなるロボットビジョンシステムは,1辺4cm程度の小さなサイズで,多数の視覚特徴を実時間で出力できる.
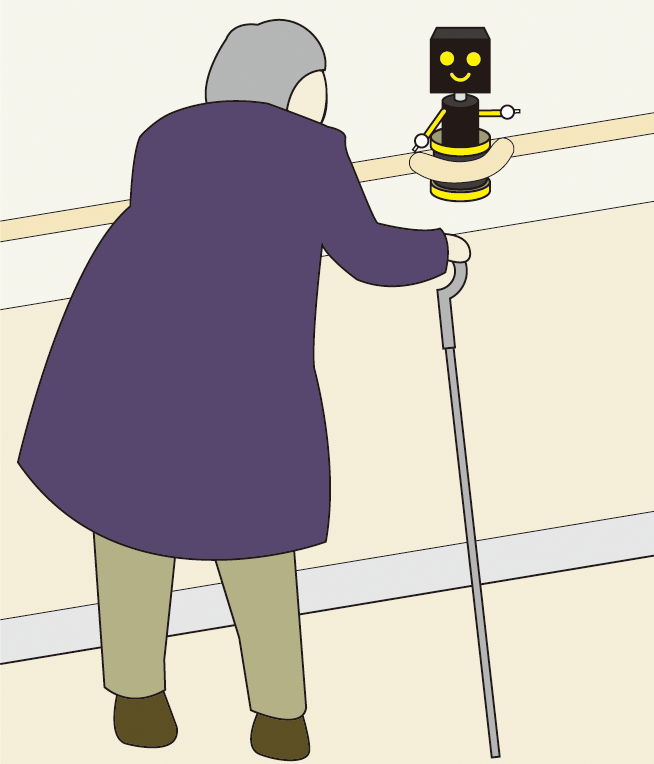
本コミュニケーションロボットの特徴は、手すりの上を移動することである。ケータイや地図が読めない方でも問題なく、音声とジェスチャで指示してくれる。さらに人はロボットの手を握って誘導される。この時、ロボットの腕が伸び縮み可能なシステムを構築した。これにより、人の歩行速度に応じた無理のない道案内が可能である。本研究室でアルゴリズムを開発した「測域センサを用いた人検出システム」を応用しており、複数人が存在する環境内においても対象者を見失うことがなく、動作可能である。また、ロボットと案内される人の対話が破綻している場合等にオペレータが介入可能である。その介入頻度を簡易に制御可能であり、オペレータの負荷を軽減することが可能である。

論文
「A Pedestrian Avoidance Method Considering Personal Space for a Guide Robot 」(2019)『Robotics』8p.21 pages.
「Realization of a Robot System That Plays “Darumasan-Ga-Koronda ” Game with Humans」(2019)『Robotics』8p.15 pages.
「Cluster-based approach to discriminate the user’s state whether a user is embarrassed or thinking to an answer to a prompt」(2017)『Journal on Multimodal User Interfaces』11p.185-196.
特許
特願2017-37648
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム