ローコストで可変性のあるイベント空間の創出
ダンボールを加工して構造体をつくります。この構造体を組み合わせて、建築の柱梁構造のようなフレームを構築して、簡易なイベント空間を創出します。ダンボールは安価で軽量で再生可能な材料です。自在に組み合わせて、イベント活動に合わせた会場設定が可能です。

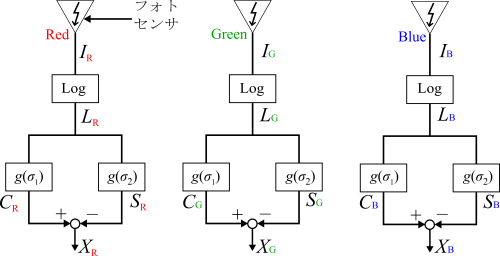
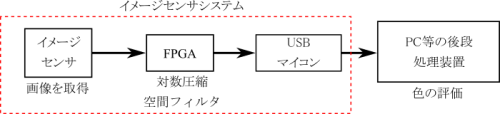
本技術のコアは,視覚神経系が行っている情報処理(視覚信号の対数変換や空間バンドパスフィルタ等)を実装した回路にある.本回路は,視覚神経系を模倣した並列演算を活用して,省電力で,照明光の強度や色の変化にほとんど影響されることなく多数の視覚特徴(色・方位別輪郭等)を検出することが出来る.この回路を実装したFPGAとイメージセンサからなるロボットビジョンシステムは,1辺4cm程度の小さなサイズで,多数の視覚特徴を実時間で出力できる.




論文
「FPGA implementation of an algorithm that enables color constancy」(2020)『Proceedings of the IEEE/SICE International Symposium on System Integration』p.991-995.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム© INNOVATION DAYS 2021 智と技術の見本市.