ユーザの視線行動に適応した エージェントの視線行動の開発と評価
人の目を見て話すのが苦手な人向けの対話エージェント
情報科学部
情報メディア学科
ヒューマンインタフェース研究室
神田智子
教授
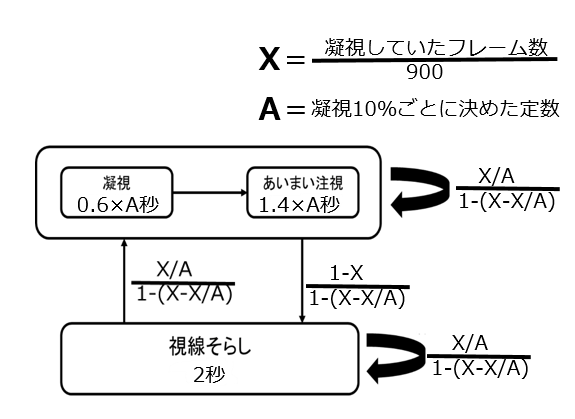
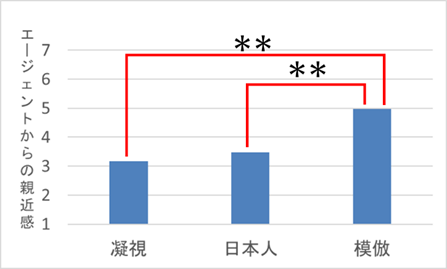
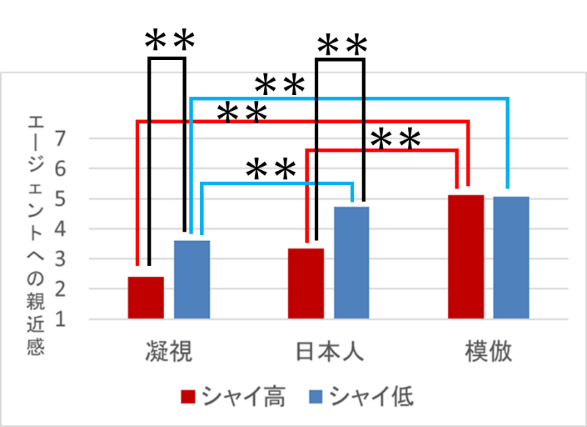
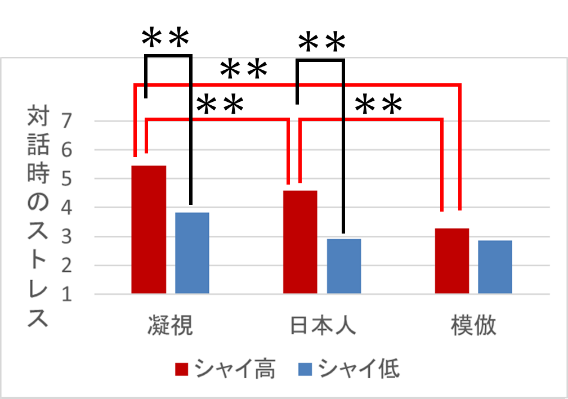
シャイな人間は対話相手の視線に敏感であり,注視されることを嫌うということが示されている.本研究は実験参加者の視線行動に適応するエージェントの視線行動の開発と評価を目的とする.具体的には,対話中のユーザの視線行動をアイトラッカーで取得し,過去15秒間にユーザがエージェントの目を注視していた割合を基に対話エージェントがユーザの目を注視する割合を適応させ,ユーザと類似した凝視量を保ちながら視線行動をとる対話エージェントを開発した.評価実験では,シャイなユーザグループに対話のストレスの軽減効果および対話エージェントへの親近感の向上効果が見られた.
論文
「Development and Evaluation of Agent's Adaptive Gaze Behaviors」(2020)HorieKazuhiro『Proceedings of Human-agent Interaction 2020 (HAI'20)』
「ユーザの視線行動に適応したエージェントの視線行動の開発と評価」(2020)堀江一弘『信学技報HCS2020-23』120(136)p.11-16.
「ユーザの視線行動に適応したエージェントの視線行動の開発と評価」(2020)堀江一弘『HAIシンポジウム2020』