
シミュレーションによる半導体デバイスの解析・設計支援技術
[概要] コンピュータシミュレーションを用いて、半導体素子の特性を解析する研究を行っています。ナノ~マイクロメートルスケールにおける電子や原子、あるいは熱の挙動を独自開発した粒子シミュレータで高精度に予測し、より高性能で信頼性の高い半導体素子設計に役立てることを目指しています。
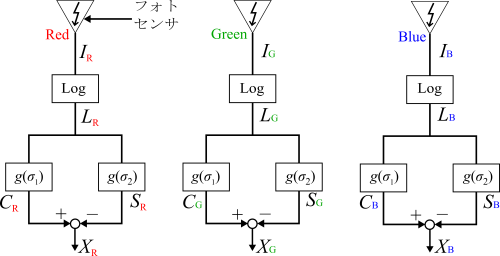
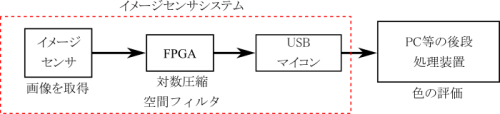
本技術のコアは,視覚神経系が行っている情報処理(視覚信号の対数変換や空間バンドパスフィルタ等)を実装した回路にある.本回路は,視覚神経系を模倣した並列演算を活用して,省電力で,照明強度や照明色の変化にほとんど影響されることなく多数の視覚特徴(色・方位別輪郭等)を検出することが出来る.この回路を実装したFPGAとイメージセンサからなるロボットビジョンシステムは,1辺4cm程度の小さなサイズで,多数の視覚特徴を実時間で出力できる.




論文
「FPGA implementation of an algorithm that enables color constancy」(2020)『Proceedings of the IEEE/SICE International Symposium on System Integration』p.991-995.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム