「小さなまち」の維持・管理・運営と地域住文化の継承
本研究では、従来の建築計画・建築設計・環境デザインでは見過ごされがちであった地方の「小さなまち」の維持・管理・運営のモデルを構築し、空き家対策としてのリノベーション提案を行い、「まちの居場所」を創出する。また、「小さなまち」の地域固有性を発掘・発信するとともに、地域住文化を継承するためのビジョンを提案する。さらに、本研究で得られた成果は「小さなまち」のまちづくりに還元し、コミュニティデザインの場を創出する。
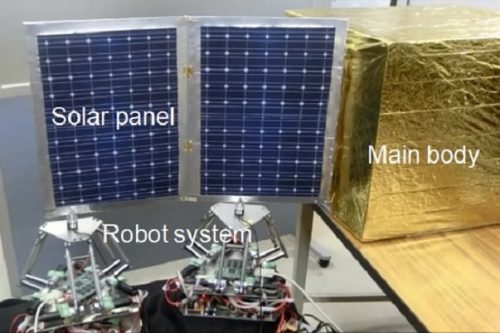
宇宙機用の展開構造物は、地上施設にて展開挙動の性能評価が義務づけられている。近年の宇宙機は大型化、多様化が進む一方、我が国の地上試験施設は過密スケジュールに加えて、試験に要する人件費の増加が宇宙計画の一つのボトルネックになっている。本研究では、下方支持型群ロボットシステムを用いて宇宙機の展開構造物の挙動試験時の重力補償、および挙動の精密計測を実現することを目標とする。これにより、多様化する宇宙機の試験には群ロボットシステムの規模変更のみで対応でき、コスト削減と高い汎用性が期待される。
論文
「A study of a gravity compensation system for the spacecraft prototype test by using multi robots」(2020)『Artificial Life and Robotics』25p.81-88.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム