レーダ画像からレーダ断面積とアンテナパターンが評価できる?!
近傍電磁界遠方変換理論の研究
工学部
電子情報システム工学科
波動情報システム研究室
小林弘一
教授
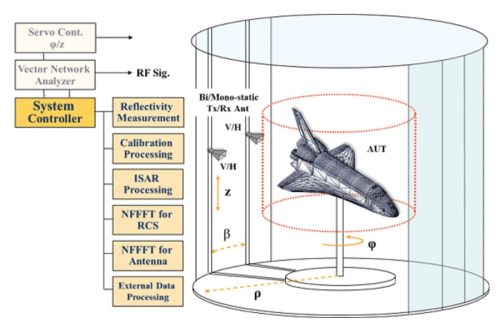
電気長の非常に大きな物体のレーダ断面積、アンテナパターンの計測は困難を極めます。このため、物体近傍の散乱電磁界を計測し、逆合成開口による画像処理後、遠方電磁界を数学的に評価する方法を確立、提案しています。
論文
「RCS Near-field to Farfield Transformation Estimation by Using GTD Target Models」(2018)KobayashiHirokazu『International Conference on Space, Aeronautical and Navigational Electronics 2018 (ICSANE2018)』SANE2018-77p.6.
「遠近傍界遠方変換における多重反射の影響について」(2019)小林弘一『電 子情報通信学会技術研究報告(宇宙· 航行エレクトロニクス)』SANE2018-90p.6.
「近傍界遠方変換によるRCS およびアンテナパターンの計測」(2018)小林弘一『電子情報通信学会技術研究 報告(宇宙· 航行エレクトロニクス)』118(135), SANE2018-25p.6.