
コロナ放電を用いた新規な活性酸素種供給法
液面にコロナ放電を照射すると生成した活性酸素種がイオン風によって液中まで輸送されます。現在、我々はこの現象を利用して液中に含まれる有害有機物の分解を行っており、その結果、従来の技術では困難な難分解性物質が分解できることを明らかにしています。また、従来法では利用できてない新たな活性酸素種が本方式では利用できている可能性が実験結果から示唆されました。このユニークな手法を用いて難分解性有機物の分解や溶液の殺菌・消毒を行います。
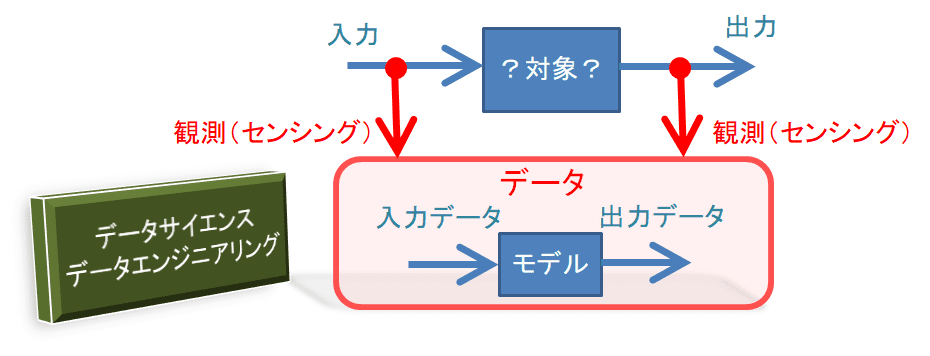
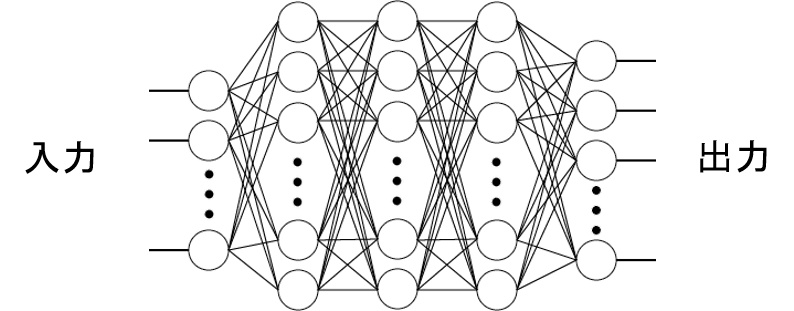
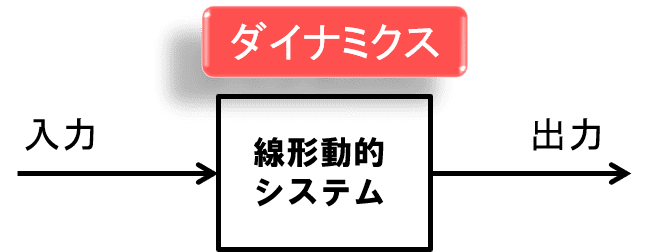
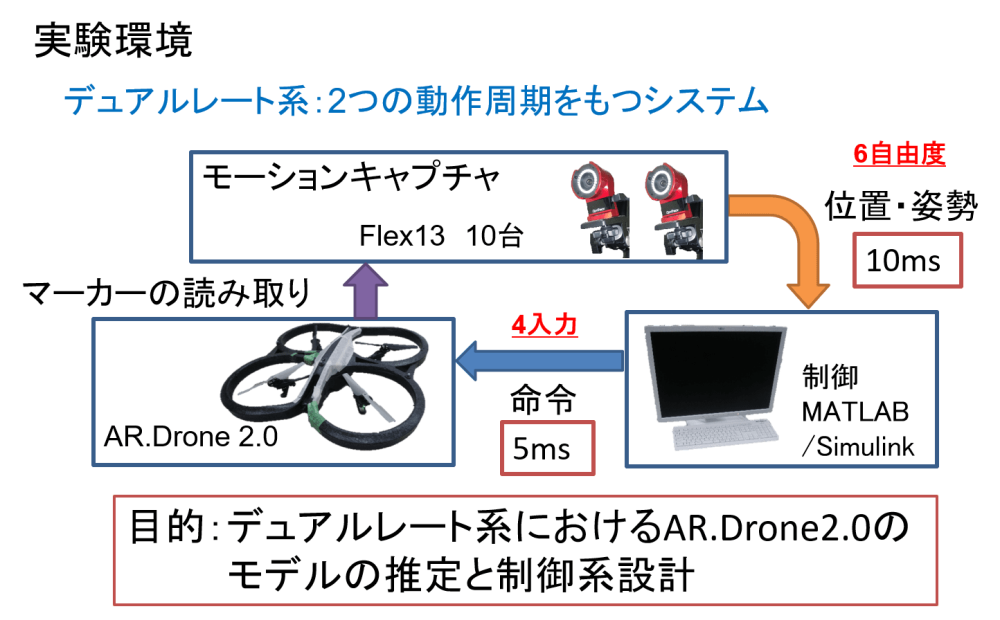
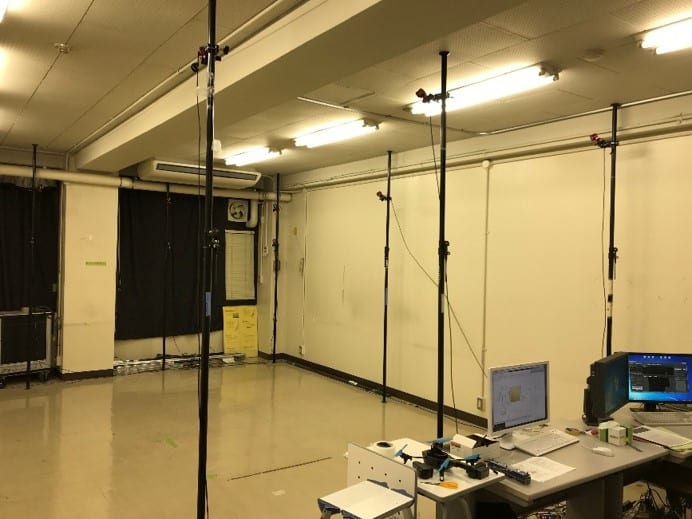
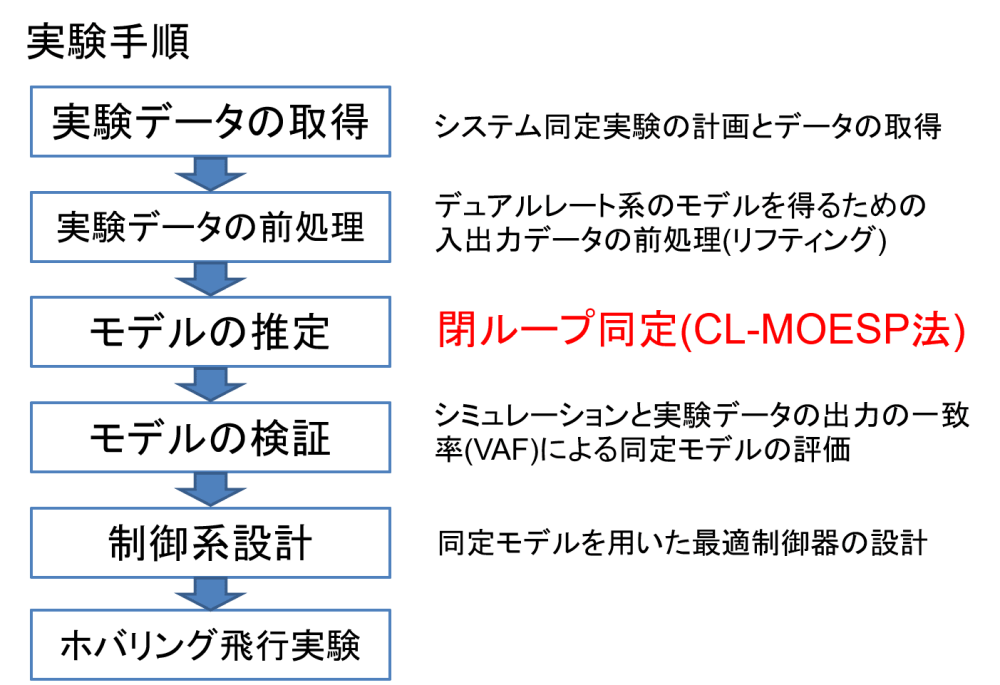
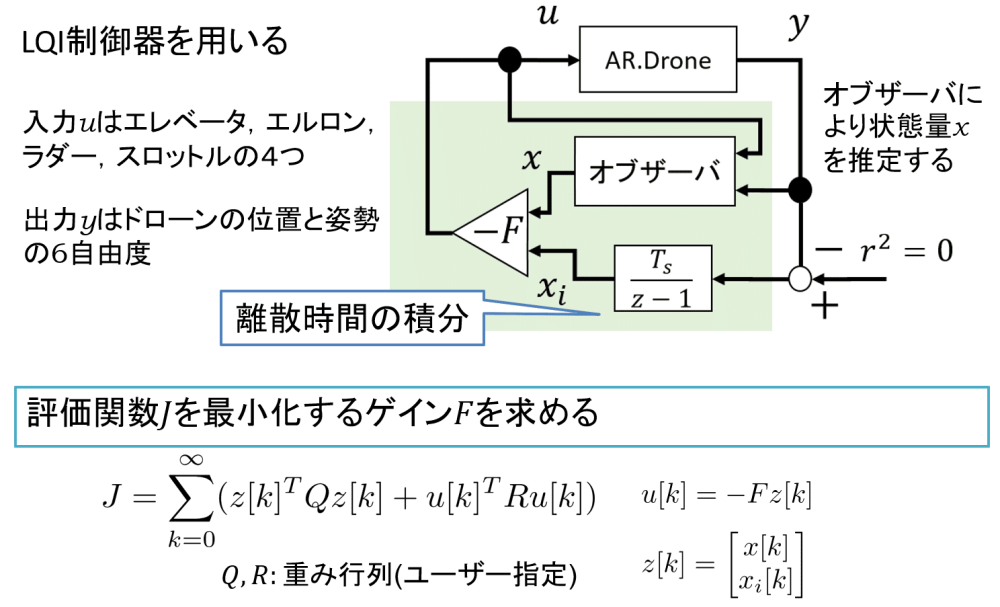
幅広い産業でビッグデータの活用が進んでいるが,予測・診断・制御・意思決定の精度向上に際してモデルの重要性が近年ますます高まっている.データエンジニアリングのひとつの分野として,システム同定法によるデータ駆動モデリングについて紹介する.具体例として,MOESP型閉ループ部分空間同定法(CL-MOESP)によるドローンの閉ループ同定と,得られた同定モデルを利用した最適制御器設計の事例研究を紹介する.

論文
「An Experiment on Closed-loop System Identification of UAV Using Dual-rate Sampling」(2018)『IFAC-PapersOnLine』51(15)p.598-603.
「Closed-Loop Identification for a Continuous-Time Model of a Multivariable Dual-Rate System with Input Fast Sampling」(2018)『IFAC-PapersOnLine』51(2)p.415-420.
「MOESP-type closed-loop subspace model identification method」(2006)『計測自動制御学会論文集』42(6)p.636-642.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム