熱流体機械の最適化設計手法の開発
熱流体機械を対象として数値流体力学(CFD)による最適化フレームワークを適用します。設計パラメータの最適な組み合わせを迅速に見つけ出す手法を提案します。手法の検証には3Dプリンタを用いて熱流体機械を製作し、性能試験、各種物理量の計測や流れの可視化を行い、現象や勘所を平易に解説します。
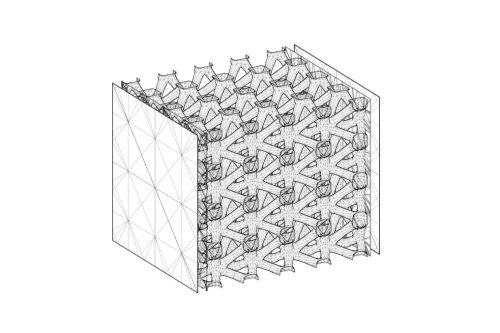
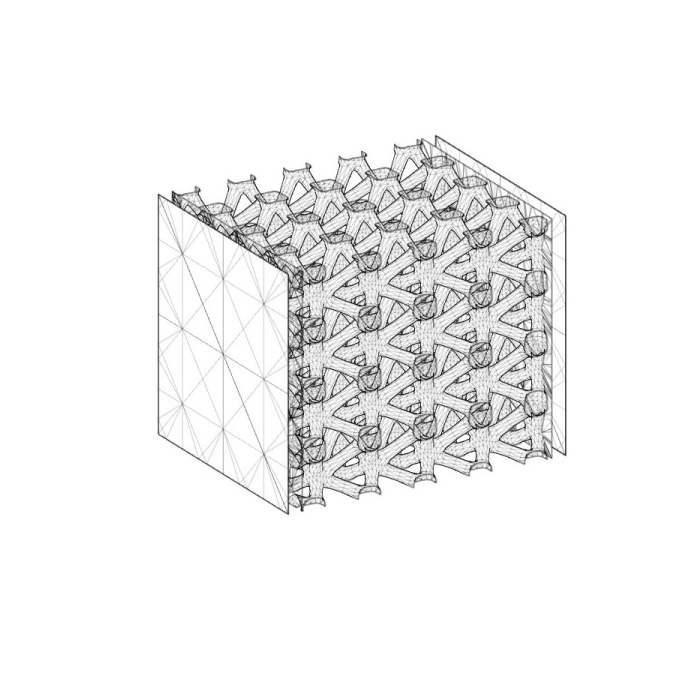
積層造形(3Dプリンティング)技術により従来では製造困難であったラティス構造を取り入れたデザインが実現でき、高剛性かつ軽量な特性を活かした製品が検討されている。モデルの出力検証と量産性や材料多様化などの積層造形技術の向上に応じたモデリング方法の試行によりラティス構造をプロダクトに取り入れるデザインの諸要件を研究する。
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム