
初等中等教育向けロボットプログラミング学習環境
2020年度から小学校においてプログラミング教育が必修化された。小学校では、ビジュアルブロックエディタを利用したプログラミングが想定されるが、中学校、高校では、テキストエディタを利用することになる。そこで、ビジュアルブロックエディタからテキストエディタへの移行をスムーズに行えるように、両エディタに対応したロボットプログラミング学習環境を開発した。また、教員の負担を軽減するための教員支援システムも開発した。
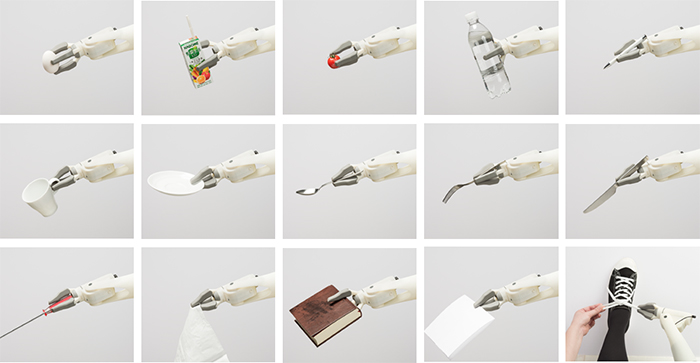
筋隆起センシングにより操作する対向3指の電動義手です.様々な日用品を操作できる対向3指ハンド,容易に着脱可能なサポータソケット,筋隆起センサで検出した筋隆起による操作システムが特長です.ハンド,ソケット,筋隆起センサ,それぞれが要素技術として利用可能です.



論文
「機能性とデザイン性を考慮した軽量・低コストの対向3指義手」(2014)『日本ロボット学会誌』32p.456-463.
特許
特許第6172651号
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム