
イノベーションを誘発するワークプレイスの設計
製品開発を行うワーカーのための新しい環境を構想するにあたっては、単なる「箱モノ」の設計を超えたプロセスを共有することが重要である。場としての環境を設計する行為を会社やチームそのものを設計する行為であるととらえ、時には「デザイン思考」の方法論を取り入れて検討をおこなうと有効である。内容の検討に加えてプロセスも合わせてマネージメントすることが求められる。
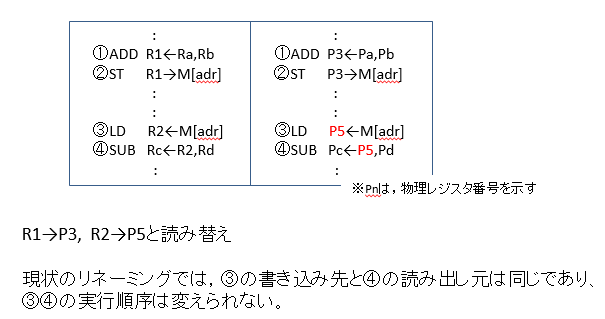
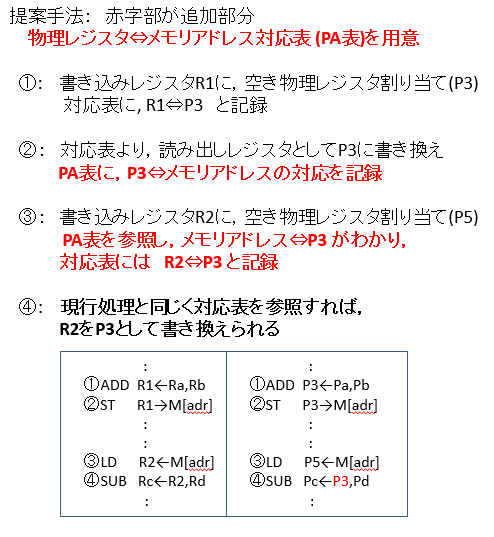
プロセッサの命令実行の効率性を妨げる要因の1つとして,ロード命令の実行にかかる時間が大きいことが挙げられる。この研究の目的は,不要なロード命令の一部を動的に排除(スキップ)するようなプロセッサの構成を提案し,命令実行の効率性をあげようとするものである。予備評価によりおおよそ15%程度のロード命令がスキップできる可能性があり、プロセッサ全体の性能を向上させることが期待できる。

研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム