
デジタル画像相関法によるき裂・欠陥の非破壊検査
負荷を受ける部材の表面画像を2枚(時間差1秒程で2枚撮影する)利用して、表面のひずみ分布を非接触で評価するデジタル画像相関法援用変位・ひずみ評価システムを構築した。さらにこれを発展させ、き裂や欠陥に生じる特有のひずみ場を利用することにより、き裂・欠陥の有無は言うに及ばず、き裂周りの応力や応力拡大係数といった力学量を高精度に非接触評価できるシステムを開発した。
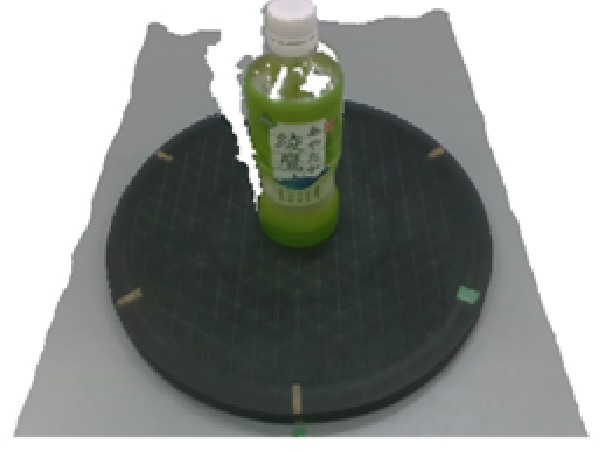
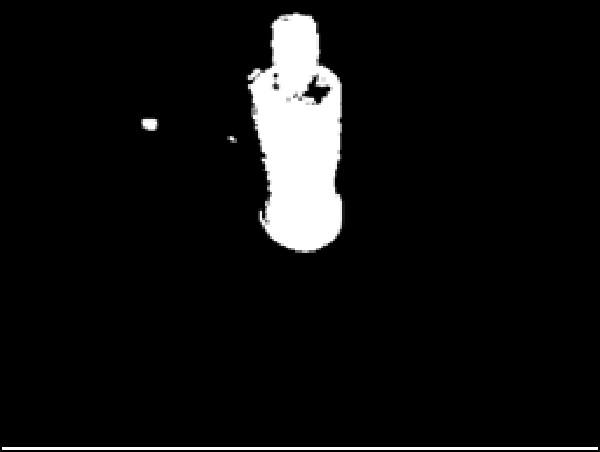
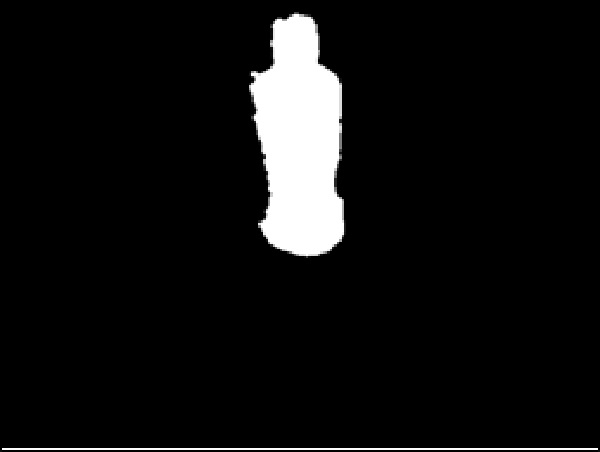
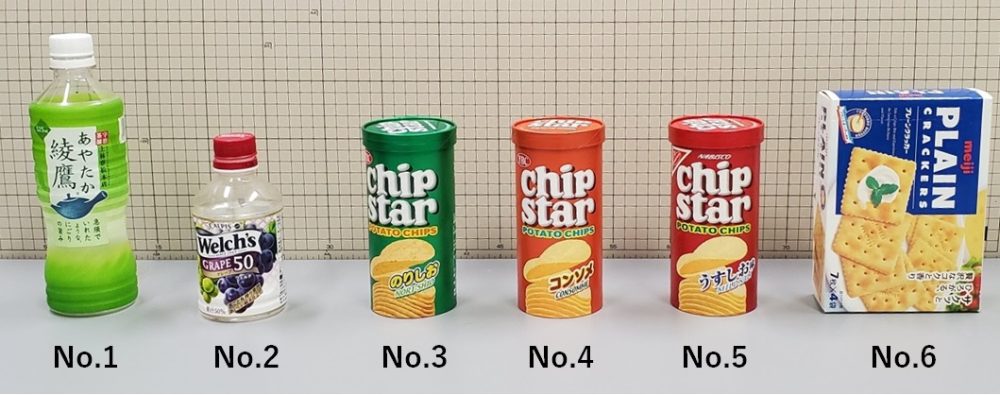
深層学習を用いたセグメンテーションのための学習では,物体が写っている画像を物体毎に数百枚から数千枚用意し,画像に写っている物体の輪郭情報を人手でアノテーションする必要があり,労力やコストがかかるという問題がある.一方,RGB-Dカメラは各画素に対応する距離に関する情報も同時に獲得できるカメラである.本研究では,深層学習を用いた物体領域推定(セグメンテーション)のための学習に必要な物体の輪郭情報をRGB-Dカメラを用いて人手によらずに高速に獲得する手法を開発した.







論文
「物体領域推定のための学習データの生成支援」(2020)『画像の認識・理解シンポジウム (MIRU2020) 論文集』p.IS3-3-19.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム