
視覚障がい者・児のためのデザイン
目が見えない・見えにくい子どもの生活動作(はさみで紙を切る、紐を丸結びするなど)の難易度の調査から、習得支援ツールや、食事や着替えを「自分で」「楽しく」進めていくためのプロダクトなどをデザインしています。また2019年度から、子どもだけでなく、視覚障害を持つ成人のための服薬支援についても研究を進めています。
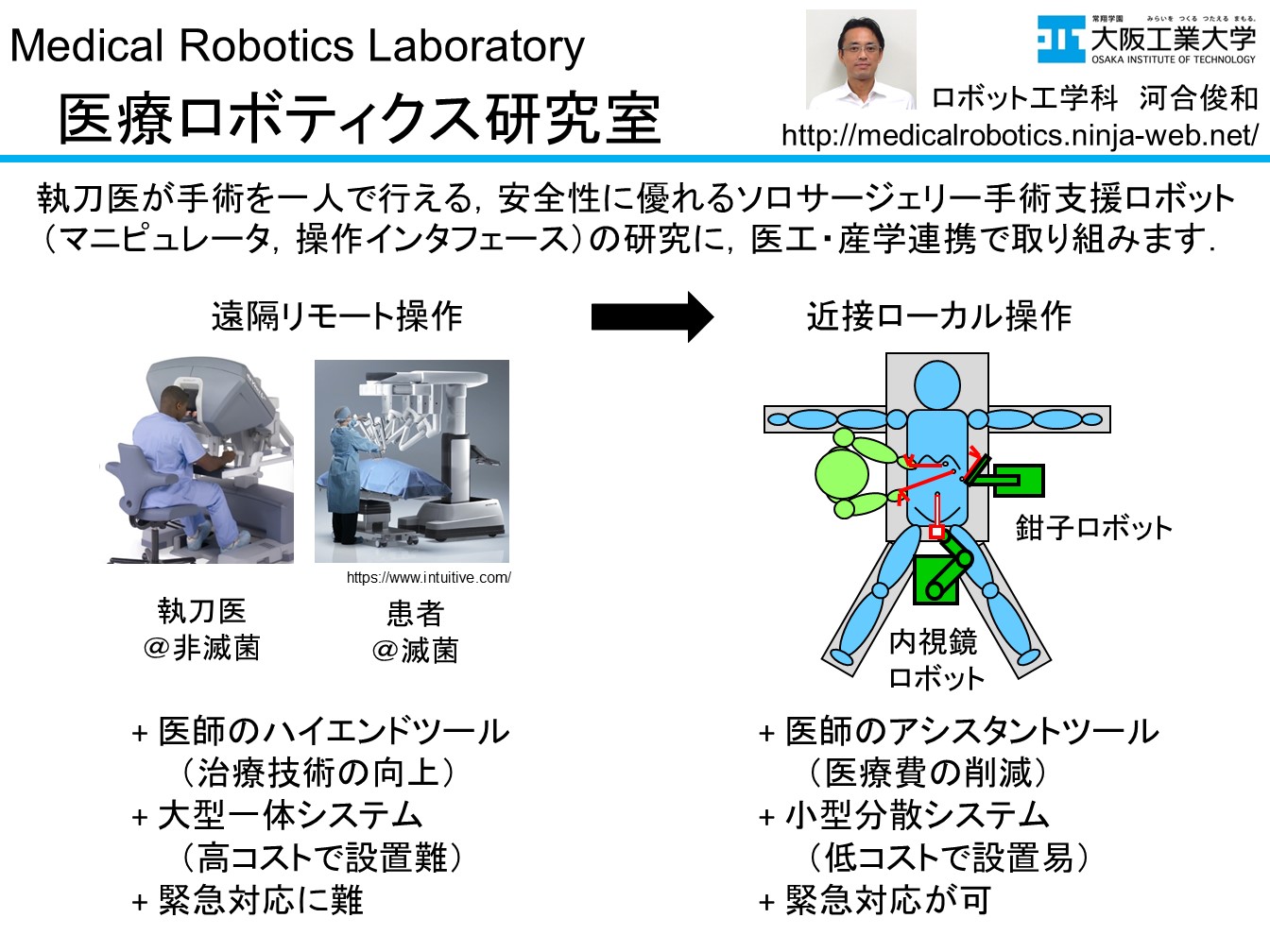
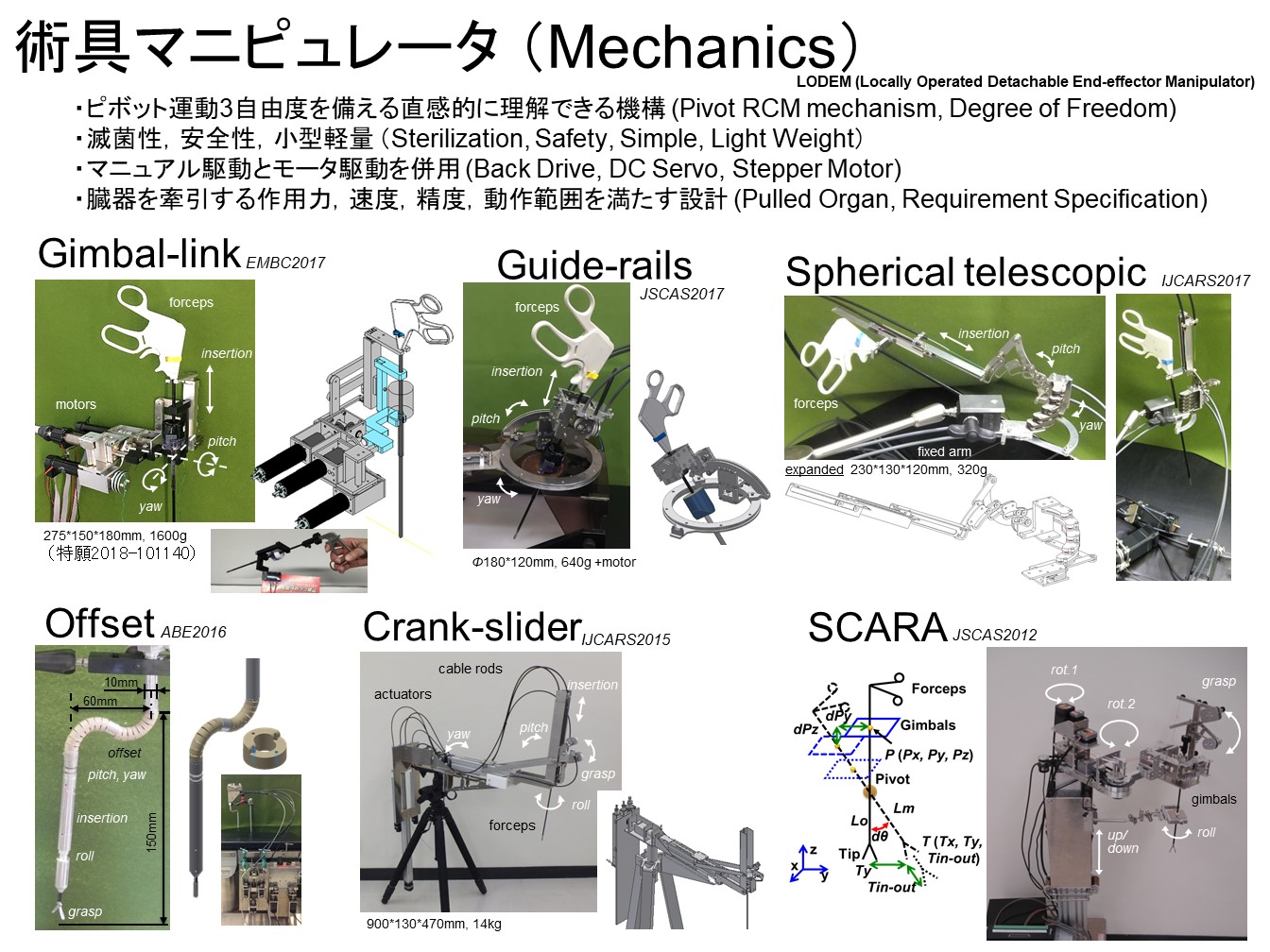
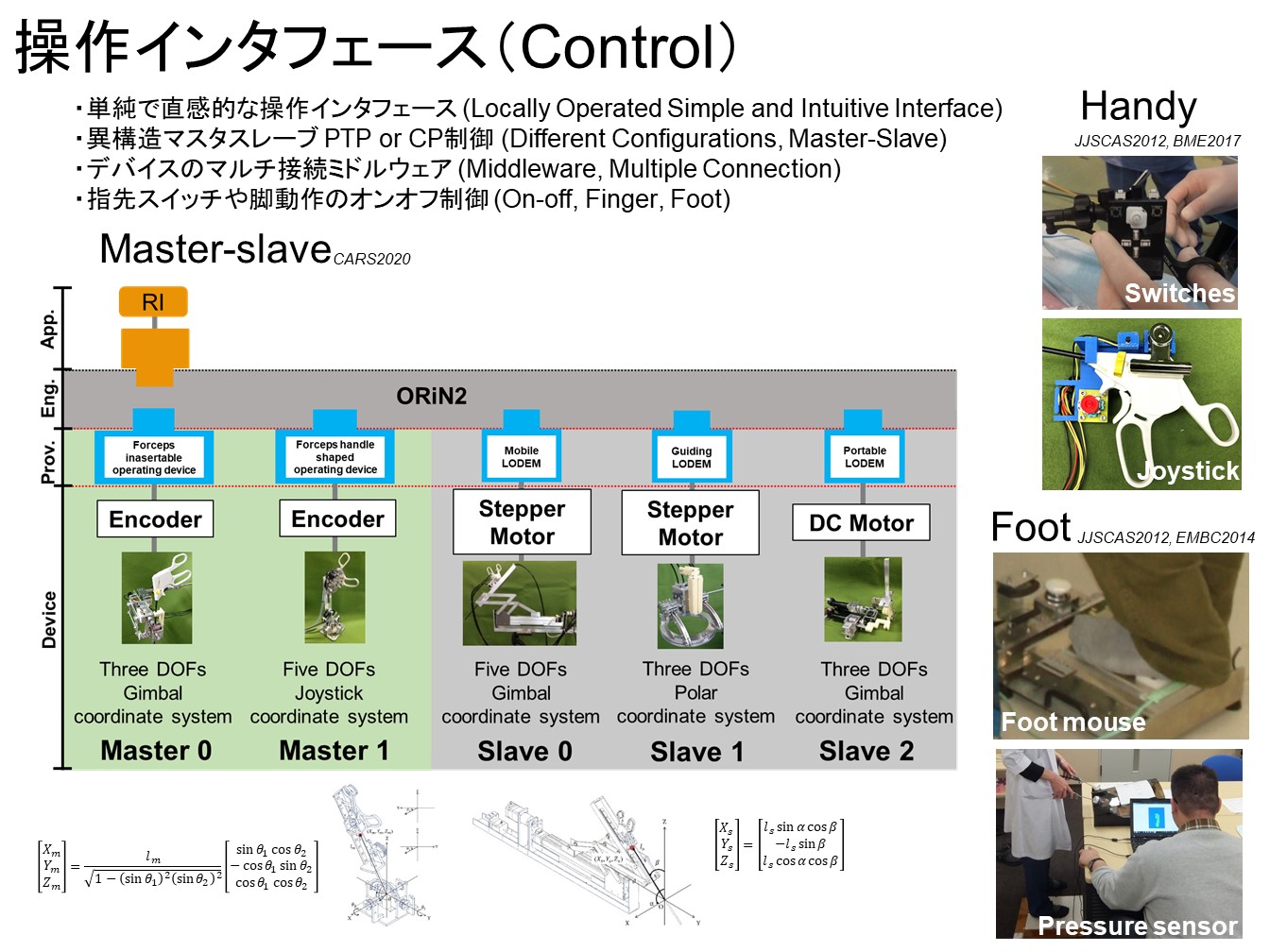
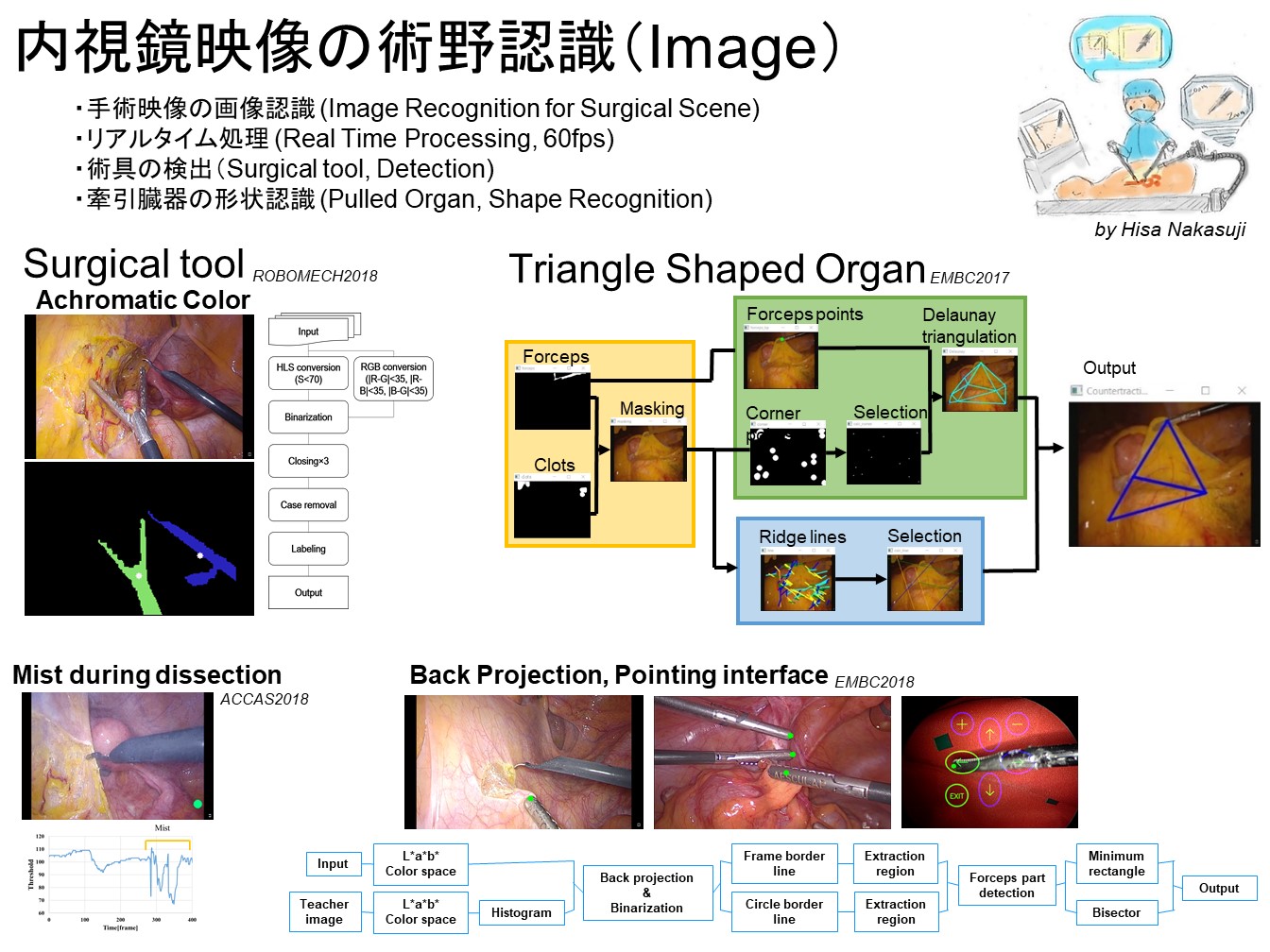
執刀医が手術を一人で行える,安全性に優れるソロサージェリー手術支援ロボットを研究しています. 人と同じ空間に存在し,共存協調して作業を行えるロボット技術の確立を目指して, 内視鏡下手術におけるカメラと鉗子の助手をマニピュレータが担えるよう,医工・産学連携で取り組んでいます. 医師のハイエンドツールであるオールインワンシステムのリモート(遠隔)操作型ロボットに対して, アシスタントツールであるローカル操作型ロボットLODEM(Locally Operated Detachable Endo-effector Manipulator)群は, センシング能力に優れる人と,安定した作業に優れるロボットが補完しあう,インテグレーションです.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム