
オンライン授業への知見の集積
COVID-19の影響により、多くの大学が前期授業開始時期の延期や、日程は予定通りだがオンライン授業形態への移行など、従来とはまったく異なった学習形態への移行に迫られた。 大阪工業大学も例外ではなく、前期授業開始を1ヶ月延期し、結果として前期期間中はほぼオンライン授業で実施された。 今回は、オンライン授業を実施することになった経緯から、オンライン授業の種類や実施方法と実践例、学生の反応について報告する。
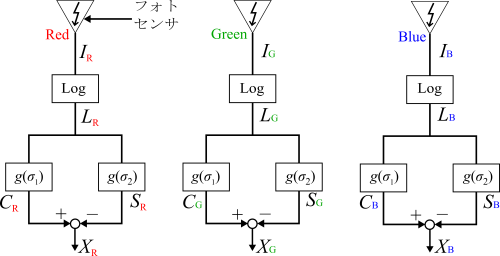
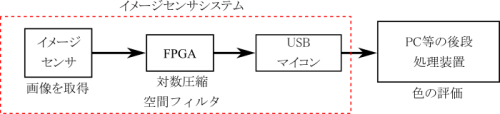
本技術のコアは,視覚神経系が行っている情報処理(視覚信号の対数変換や空間バンドパスフィルタ等)を実装した回路にある.本回路は,視覚神経系を模倣した並列演算を活用して,省電力で,照明強度や照明色の変化にほとんど影響されることなく多数の視覚特徴(色・方位別輪郭等)を検出することが出来る.この回路を実装したFPGAとイメージセンサからなるロボットビジョンシステムは,1辺4cm程度の小さなサイズで,多数の視覚特徴を実時間で出力できる.




論文
「FPGA implementation of an algorithm that enables color constancy」(2020)『Proceedings of the IEEE/SICE International Symposium on System Integration』p.991-995.
研究シーズ・教員に対しての問合せや相談事項はこちら
技術相談申込フォーム